3D Model และ Point Cloud จากงานสำรวจ: นำไปใช้ด้านไหนได้บ้าง?

หลังจากบินสำรวจด้วย Drone หรือสแกนด้วย LiDAR เสร็จเรียบร้อย — ไฟล์ที่ได้มาในรูป Point Cloud (.las, .laz) หรือ 3D Model (.obj, .ply, .e57) มักทำให้หลายคนสงสัยว่า "แล้วเอาไปทำอะไรต่อได้บ้าง?"
ความจริงคือข้อมูล 3 มิติจากงานสำรวจมีประโยชน์อย่างกว้างขวางมากกว่าที่หลายคนคิด ตั้งแต่การคำนวณปริมาตรดิน การทำ BIM ไปจนถึงการสร้าง Digital Twin ของเมืองทั้งเมือง บทความนี้จะพาไปดูว่าแต่ละด้านใช้อย่างไร และต้องการซอฟต์แวร์อะไรบ้าง
ทำความเข้าใจ: 3D Model vs Point Cloud ต่างกันอย่างไร?
ก่อนไปดูการใช้งาน ควรเข้าใจความแตกต่างของข้อมูลสองรูปแบบนี้ก่อน
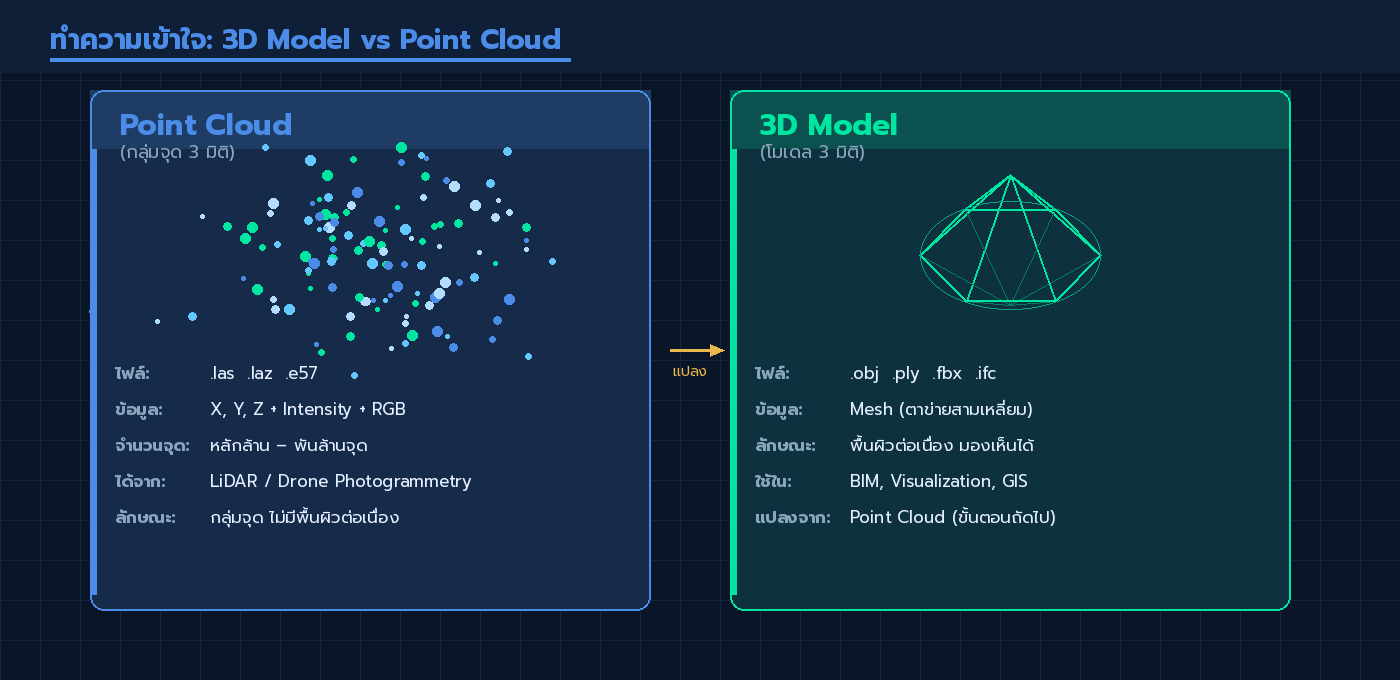
Point Cloud (กลุ่มจุด 3 มิติ) คือชุดของจุด (X, Y, Z) จำนวนมหาศาลที่ได้จากการสแกน LiDAR หรือประมวลผล Photogrammetry จาก Drone แต่ละจุดมีพิกัดสามมิติที่แม่นยำ และมักมีข้อมูลเพิ่มเติมเช่น ความเข้มแสง (Intensity) หรือสีจากภาพถ่าย (RGB) ไฟล์ที่พบบ่อยคือ .las, .laz, .e57
3D Model (โมเดล 3 มิติ) คือข้อมูลที่ผ่านการประมวลผลต่อจาก Point Cloud แล้ว กลายเป็น Mesh (ตาข่ายสามเหลี่ยม) หรือ Solid Model ที่มีพื้นผิวต่อเนื่อง มองเห็น ปรับแต่งได้ง่ายกว่า ไฟล์ที่พบบ่อยคือ .obj, .ply, .fbx, .ifc
โดยทั่วไป Point Cloud คือต้นทางข้อมูล ส่วน 3D Model คือผลลัพธ์ที่นำไปใช้งานได้ทันที — แต่ในบางงาน Point Cloud ก็ถูกใช้โดยตรงโดยไม่ต้องแปลงเป็น Mesh ก่อน
1. งานก่อสร้าง: คำนวณปริมาตร ตรวจสอบ และ As-Built Survey
นี่คือการใช้งานที่พบบ่อยที่สุดในประเทศไทย โดยเฉพาะโครงการก่อสร้างขนาดใหญ่
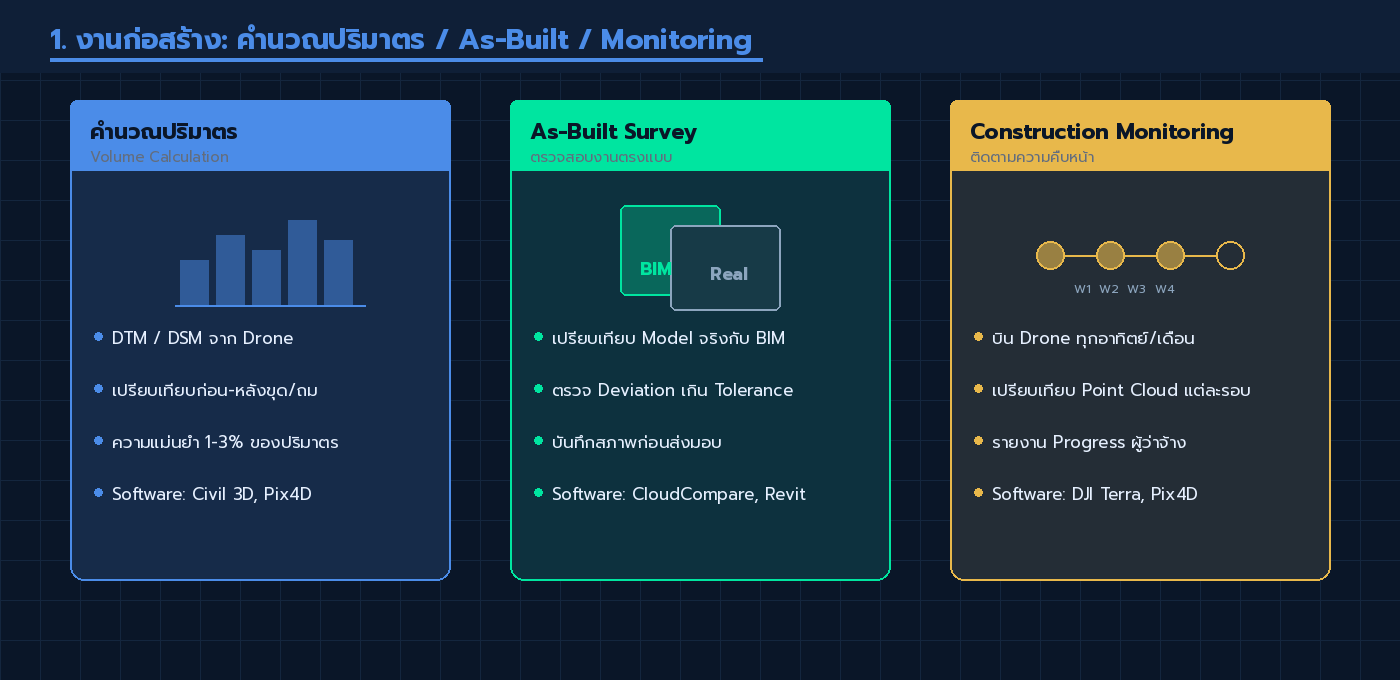
คำนวณปริมาตรดินตัด/ดินถม (Volume Calculation)
เมื่อได้ DTM (Digital Terrain Model) หรือ DSM (Digital Surface Model) จากการสำรวจ Drone แล้ว สามารถนำมาคำนวณปริมาตรดินได้อย่างแม่นยำโดยการเปรียบเทียบระหว่าง:
- แบบพื้นฐาน (Design Surface) กับ สภาพจริงก่อนก่อสร้าง
- สภาพก่อน กับ หลัง การขุดหรือถม
- ความคืบหน้าของงานเทียบกับแผน
ซอฟต์แวร์ที่ใช้: Pix4D, Agisoft Metashape, DJI Terra, AutoCAD Civil 3D — ล้วนมีฟีเจอร์คำนวณปริมาตรในตัว
As-Built Survey และตรวจสอบงาน
หลังก่อสร้างเสร็จ การสแกน 3D เพื่อทำ As-Built Survey ช่วยให้:
- เปรียบเทียบ Model จริงกับแบบ BIM ออกแบบ (เช็คว่างานตรงแบบหรือไม่)
- ตรวจหาจุดที่เบี่ยงเบนเกินค่า Tolerance ที่กำหนด
- บันทึกสภาพโครงสร้างก่อนส่งมอบงาน
ในต่างประเทศ การทำ As-Built ด้วย LiDAR กลายเป็น Requirement มาตรฐานในโครงการโครงสร้างพื้นฐานขนาดใหญ่แล้ว
การติดตามความคืบหน้า (Construction Monitoring)
บิน Drone ทุกอาทิตย์หรือทุกเดือน เปรียบเทียบ Point Cloud แต่ละรอบ ทำให้เห็นความคืบหน้าของงานเป็นรูปธรรม รายงานผู้ว่าจ้างได้ทันที
2. งาน GIS และแผนที่: DTM, Orthophoto, Terrain Analysis
ข้อมูล 3D จากการสำรวจเป็นฐานสำคัญของงาน GIS หลายประเภท
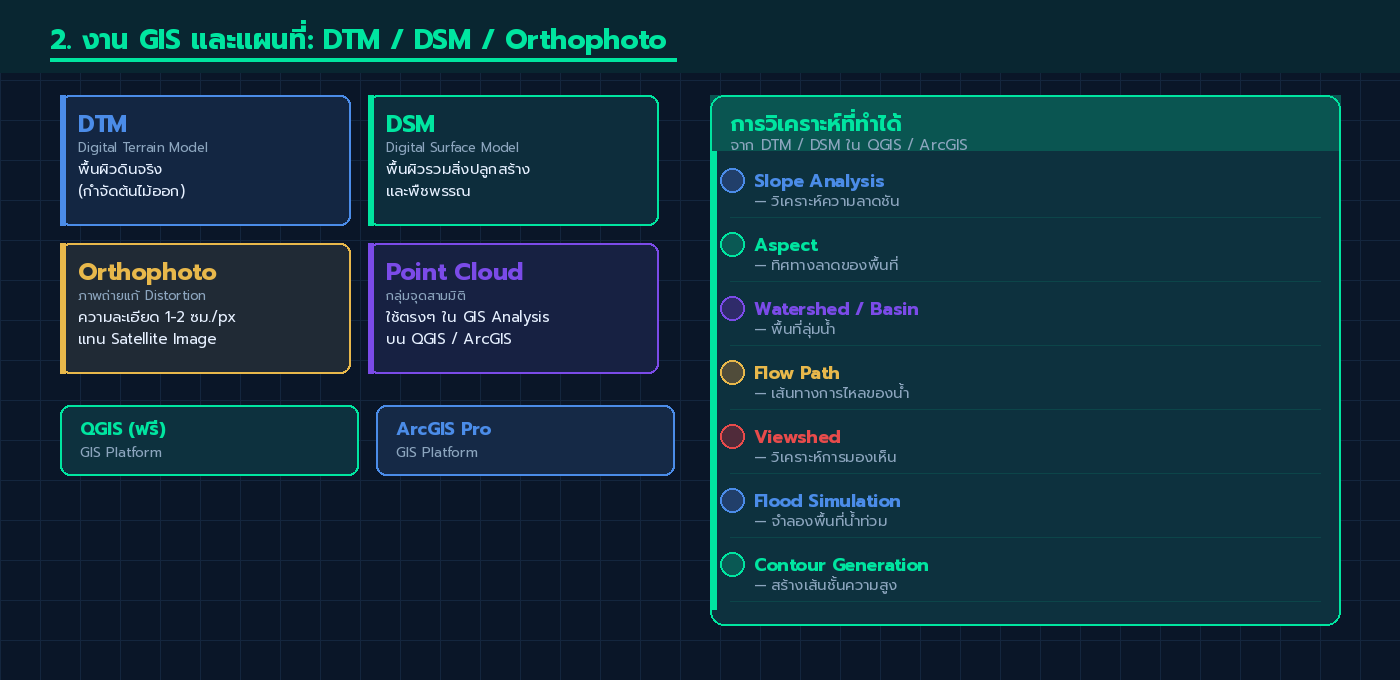
สร้าง DTM / DSM สำหรับวิเคราะห์ภูมิประเทศ
- DTM (Digital Terrain Model) — แสดงพื้นผิวดินจริง กำจัดต้นไม้/สิ่งปลูกสร้างออก ใช้ในงานผังเมือง, น้ำท่วม, การไหลของน้ำ
- DSM (Digital Surface Model) — แสดงพื้นผิวทั้งหมดรวมสิ่งปลูกสร้าง ใช้ประเมินร่มเงา, วิเคราะห์การมองเห็น (Viewshed)
การวิเคราะห์ที่ทำได้จาก DTM/DSM: ความลาดชัน (Slope), ทิศทางลาด (Aspect), พื้นที่ลุ่มน้ำ (Watershed), เส้นทางน้ำ (Flow Path) ทั้งหมดนี้ทำได้ใน QGIS หรือ ArcGIS โดยตรง
Orthophoto ความละเอียดสูง
ผลพลอยได้จากการบิน Drone Photogrammetry คือ Orthophoto ที่แก้ค่า Distortion แล้ว ใช้เป็นแผนที่ภาพถ่ายแทน Satellite Image ได้ ด้วยความละเอียดที่สูงกว่ามาก (ลงไปถึง 1-2 ซม./พิกเซล)
วางผังและออกแบบโครงสร้างพื้นฐาน
ผังเมือง, เส้นทางถนน, ระบบท่อ — ทั้งหมดต้องการข้อมูลระดับพื้นที่แม่นยำเป็นฐาน ซึ่ง DTM จาก Drone หรือ LiDAR ตอบโจทย์ได้ดีกว่าการสำรวจแบบดั้งเดิมในเรื่องความครอบคลุมพื้นที่
3. BIM และงานสถาปัตยกรรม: Scan-to-BIM
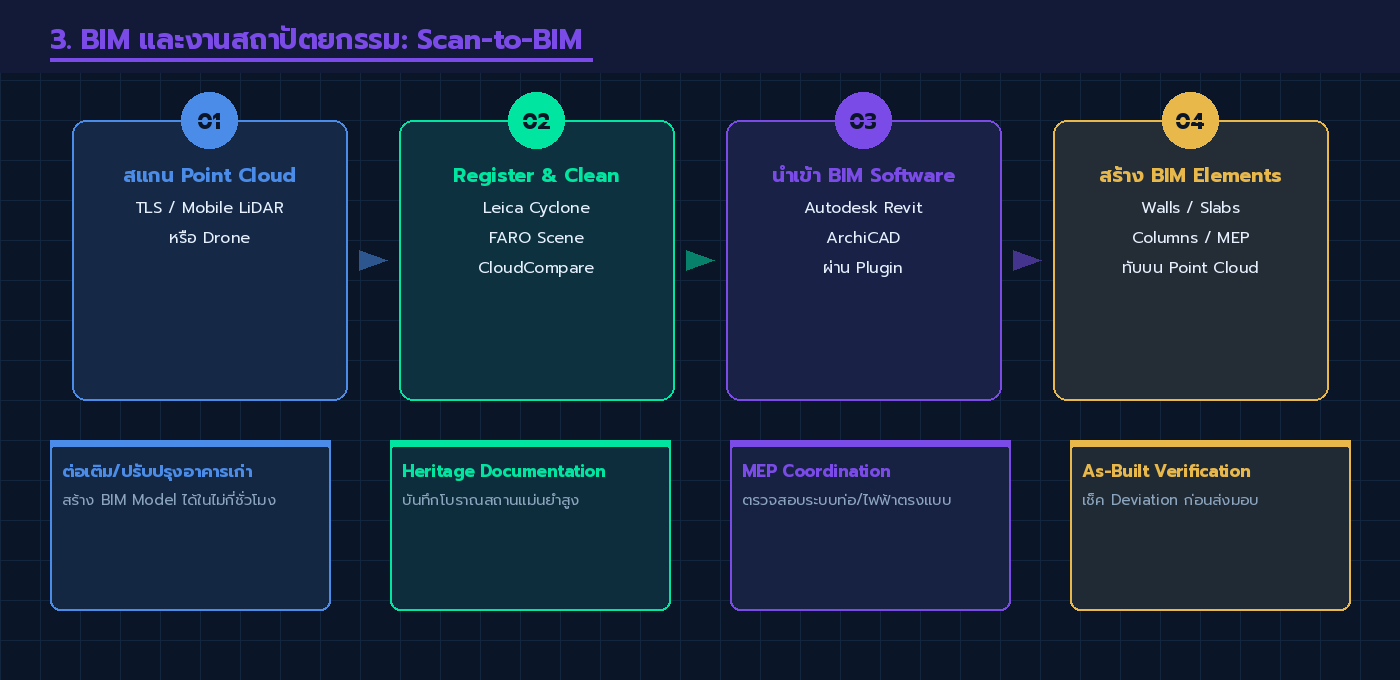
Scan-to-BIM (หรือ Reality-to-BIM) คือกระบวนการแปลง Point Cloud จากการสแกนอาคารหรือโครงสร้างที่มีอยู่จริง ให้กลายเป็น BIM Model ใน Revit, ArchiCAD, หรือ Navisworks
ใช้ทำอะไรได้บ้าง?
ต่อเติมหรือปรับปรุงอาคารเก่า — แทนที่จะวัดด้วยตลับเมตร การสแกน 3D ช่วยให้ได้ขนาดและรูปทรงของอาคารทั้งหมดอย่างละเอียดในเวลาไม่กี่ชั่วโมง จากนั้นสร้าง BIM Model สำหรับการออกแบบต่อเติมได้ทันที
Heritage Documentation — บันทึกสถาปัตยกรรมหรือโบราณสถานในรูปแบบดิจิทัลที่แม่นยำ ใช้เป็นข้อมูลอ้างอิงสำหรับการบูรณะ
MEP Coordination — ตรวจสอบว่างานระบบ (ท่อน้ำ, ไฟฟ้า, HVAC) ติดตั้งตรงตำแหน่งตามแบบหรือไม่
ขั้นตอน Scan-to-BIM
- สแกน Point Cloud ด้วย LiDAR (Terrestrial Laser Scanner หรือ Mobile LiDAR)
- Register และ Clean Point Cloud ใน Leica Cyclone, FARO Scene, หรือ CloudCompare
- นำเข้า Revit ผ่านปลั๊กอิน หรือแปลงเป็น Mesh ก่อน
- สร้าง BIM Elements ทับบน Point Cloud (Walls, Slabs, Columns)
4. Digital Twin: โมเดล 3D ที่มีชีวิต
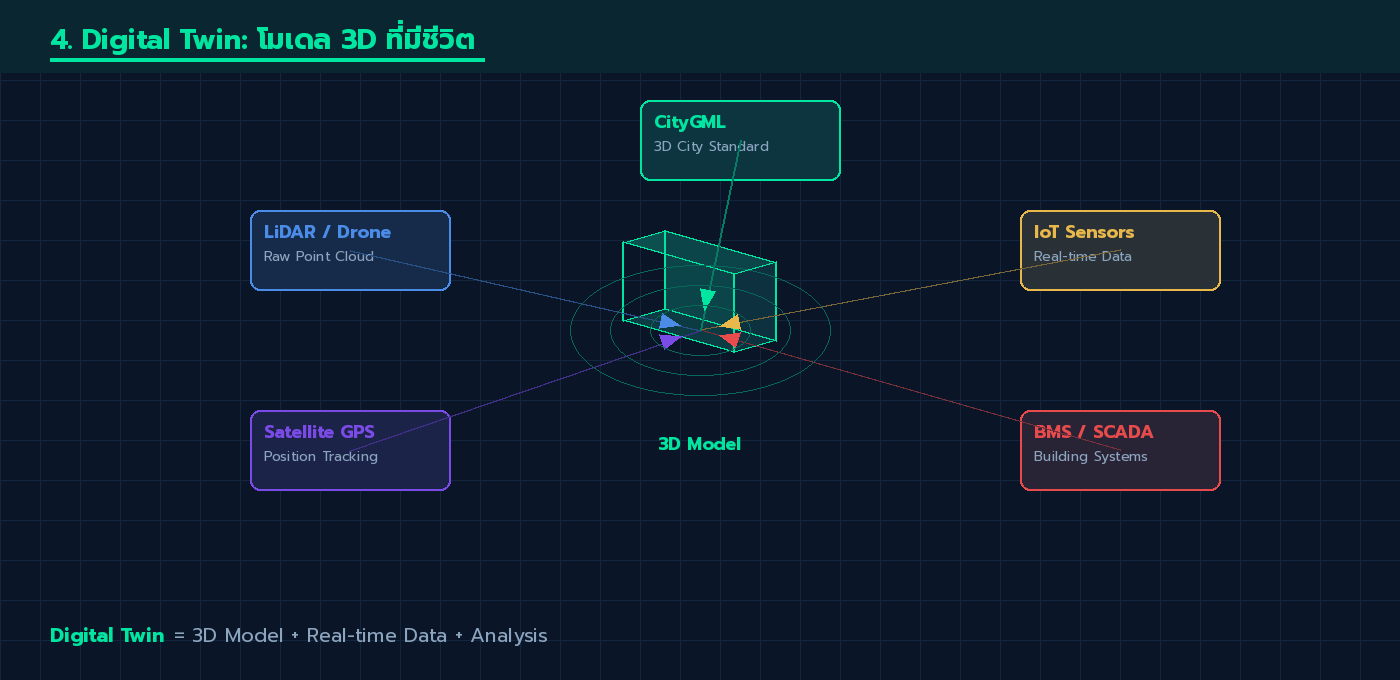
Digital Twin คือ 3D Model ที่เชื่อมต่อกับข้อมูล Real-time — ทำให้ Model ไม่ได้เป็นแค่ภาพ แต่สะท้อนสภาพจริงของโครงสร้างหรือพื้นที่ตลอดเวลา
Digital Twin สำหรับโครงสร้างพื้นฐาน
- เชื่อมต่อ 3D Model ของสะพานกับ Sensor วัดการสั่นสะเทือน ตรวจสอบสุขภาพโครงสร้างแบบ Real-time
- โรงงานอุตสาหกรรมที่สแกน 3D แล้วเชื่อมกับ IoT ติดตามเครื่องจักร
- อาคารสำนักงานที่ใช้ Building Management System (BMS) ร่วมกับ BIM
3D City Model
จาก Point Cloud ของ Drone หรือ Aerial LiDAR สร้าง 3D City Model ในมาตรฐาน CityGML ใช้สำหรับ:
- จำลองการไหลของน้ำท่วมในเมือง
- วางแผนเส้นทางฉุกเฉิน
- วิเคราะห์ผลกระทบจากการพัฒนาที่ดิน
ซอฟต์แวร์ที่ใช้: Bentley iTwin, Esri CityEngine, Unity/Unreal Engine (สำหรับ Visualization)
5. งานตรวจสอบโครงสร้าง (Structural Inspection)
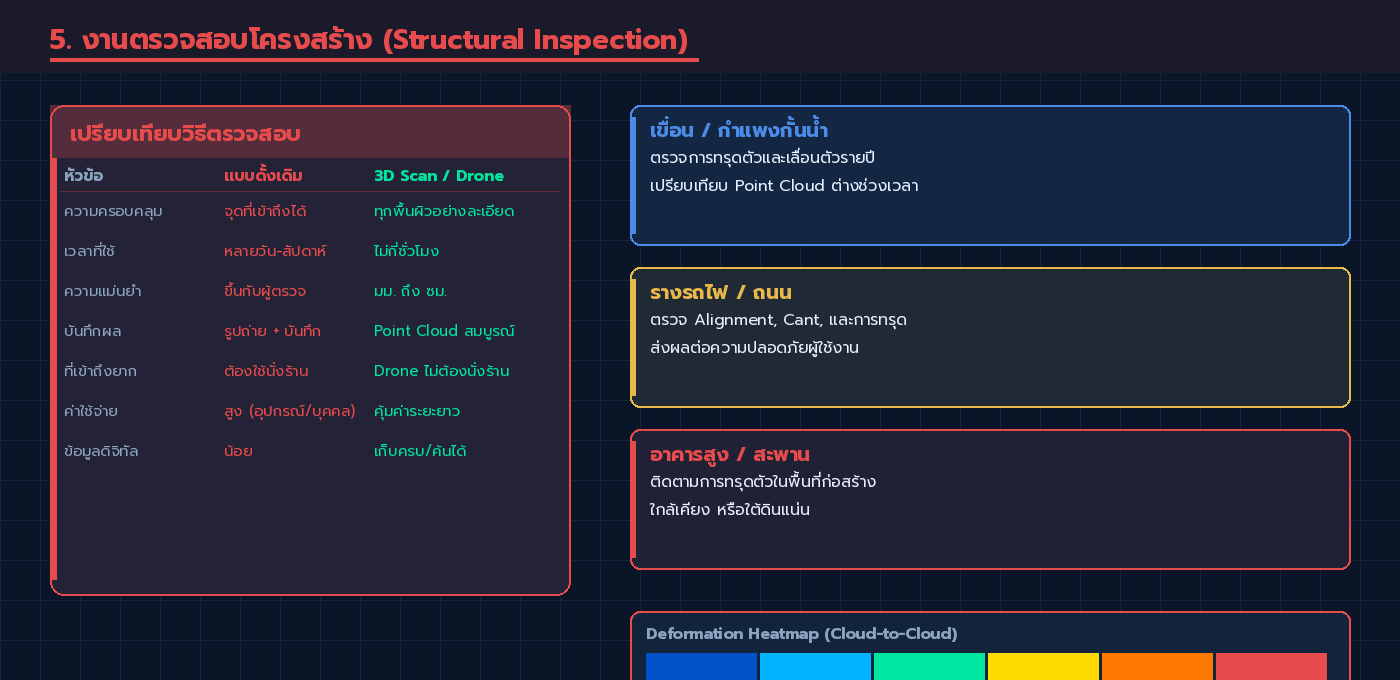
การตรวจสอบโครงสร้างด้วย Point Cloud มีข้อดีชัดเจนกว่าการตรวจด้วยสายตาหรือภาพถ่ายทั่วไป
ตรวจสอบการเสียรูป (Deformation Analysis)
เปรียบเทียบ Point Cloud ที่สแกนในช่วงเวลาต่างกัน เพื่อตรวจหาการทรุดตัว การเอียง หรือการขยายตัวของโครงสร้าง เช่น:
- เขื่อนหรือกำแพงกั้นน้ำ — ตรวจการเลื่อนตัวหรือทรุดตัวรายปี
- รางรถไฟ — ตรวจสอบ Alignment และ Cant
- อาคารสูงในพื้นที่ก่อสร้างใกล้เคียง — ติดตามการทรุดตัว
ตรวจสอบโครงสร้างที่เข้าถึงยาก
Drone LiDAR หรือ Drone ถ่ายภาพสำหรับทำ Photogrammetry ช่วยตรวจสอบสะพาน, ปล่องไฟ, โครงหลังคาขนาดใหญ่ โดยไม่ต้องใช้นั่งร้านหรือรถกระเช้า ประหยัดทั้งเวลาและงบประมาณ
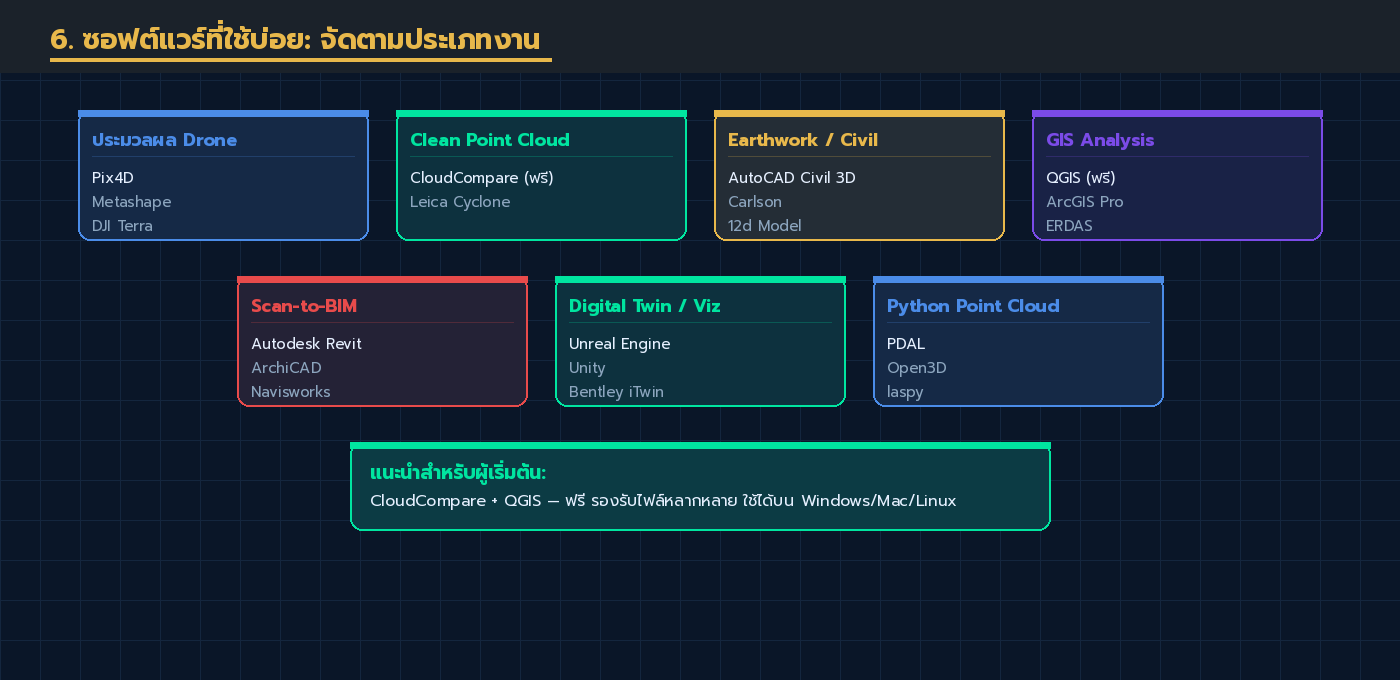
6. ซอฟต์แวร์ที่ใช้บ่อย: จัดตามประเภทงาน
| ประเภทงาน | ซอฟต์แวร์ที่แนะนำ |
|---|---|
| ประมวลผล Drone → Point Cloud / Model | Pix4D, Agisoft Metashape, DJI Terra |
| จัดการและ Clean Point Cloud | CloudCompare (ฟรี), Leica Cyclone, FARO Scene |
| คำนวณปริมาตร / Earthwork | AutoCAD Civil 3D, Carlson, 12d Model |
| GIS Analysis | QGIS (ฟรี), ArcGIS Pro |
| Scan-to-BIM | Autodesk Revit + plugin, ArchiCAD |
| Visualization / Digital Twin | Unreal Engine, Unity, Bentley iTwin |
| Point Cloud ด้วย Python | PDAL, Open3D, laspy |
CloudCompare เป็นตัวเลือกยอดนิยมสำหรับผู้เริ่มต้น เพราะฟรี รองรับไฟล์หลากหลาย และมีฟีเจอร์ครบสำหรับงาน Basic ถึง Intermediate
7. ขั้นตอนทั่วไปจาก Raw Data ถึงการใช้งาน
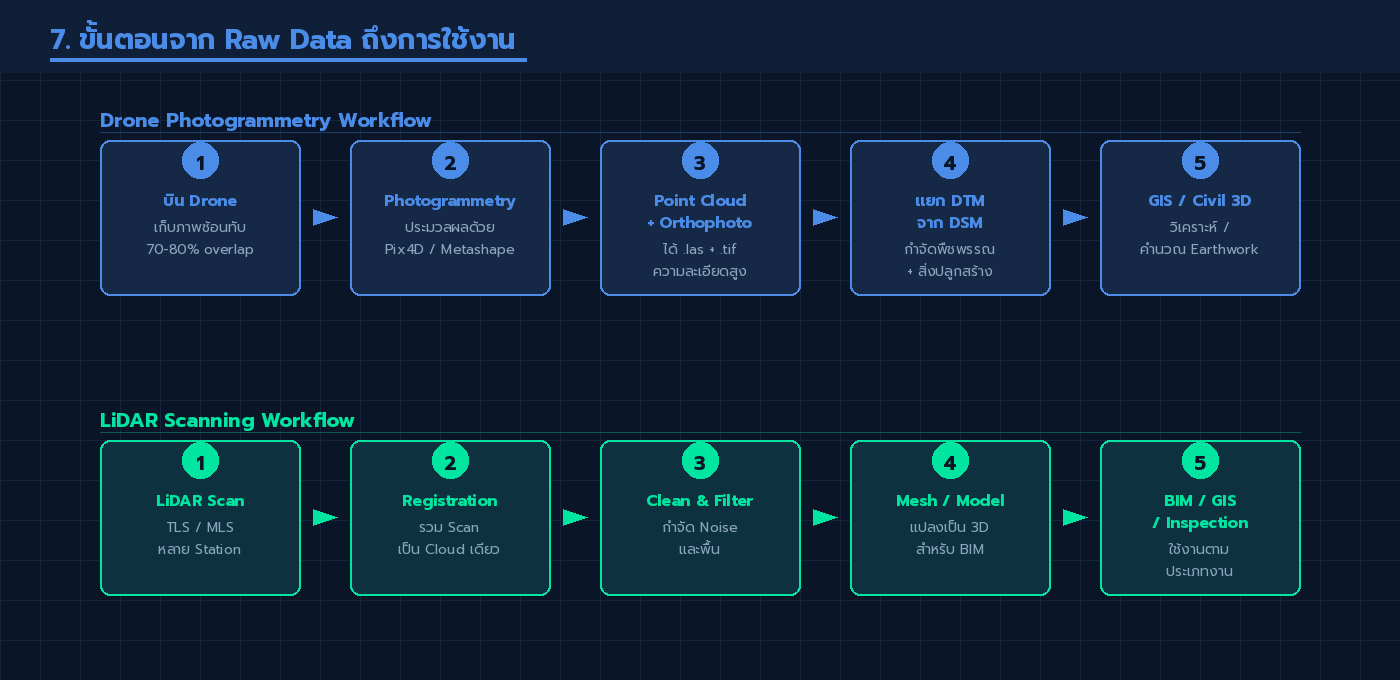
เพื่อให้เห็นภาพรวม ขั้นตอนมาตรฐานมักเป็นดังนี้:
สำหรับงาน Drone Photogrammetry:
- บิน Drone เก็บภาพ → ประมวลผล Photogrammetry → ได้ Point Cloud + Orthophoto + DSM
- แยก DTM จาก DSM (กำจัดพืชพรรณ/สิ่งปลูกสร้าง)
- นำเข้า GIS Software สำหรับวิเคราะห์ หรือ Civil 3D สำหรับคำนวณ Earthwork
สำหรับงาน LiDAR Scanning:
- สแกนด้วย TLS/MLS → ได้ Raw Point Cloud
- Register หลาย Scan Station ให้เป็น Point Cloud เดียว
- Clean และ Filter (กำจัด Noise, กำจัดพื้น)
- แปลงเป็น Mesh สำหรับ BIM หรือใช้ Point Cloud โดยตรงใน GIS/Inspection
สรุป
ข้อมูล 3D จากงานสำรวจไม่ได้มีไว้แค่ "ดูสวย" — แต่เป็นสินทรัพย์ดิจิทัลที่มีมูลค่าสูงมาก หากรู้จักนำไปใช้งานอย่างถูกประเภท ตั้งแต่คำนวณ Earthwork ที่ตรงไปตรงมา ไปจนถึง Digital Twin ที่ซับซ้อน จุดเริ่มต้นที่ดีคือ CloudCompare (ฟรี) และ QGIS (ฟรี) ที่เริ่มต้นได้ทันทีโดยไม่มีค่าใช้จ่าย
หากต้องการนำข้อมูลสำรวจของท่านไปต่อยอดเป็น 3D Model, DTM, BIM หรือ Digital Twin ทีม WAIPIA Development ให้บริการครบวงจร ตั้งแต่การสำรวจ ประมวลผล ไปจนถึงพัฒนาซอฟต์แวร์แสดงผลข้อมูลภูมิสารสนเทศ
ติดต่อปรึกษาได้ที่ โทร. 095-7243421 | Line: @info_wd | waipia.com
บทความโดย ทีม WAIPIA Development — บริการสำรวจและแผนที่ครบวงจร