การปรับแก้วงรอบสำรวจ: หลักการ วิธีคำนวณ และตัวอย่างจริง

วงรอบสำรวจ (Traverse) เป็นหัวใจสำคัญของงานสำรวจรังวัดภาคพื้นดิน ไม่ว่าจะเป็นการสำรวจเพื่อทำแผนที่ การกำหนดเขตที่ดิน หรือการวางแนวโครงสร้างก่อสร้าง แต่ในทางปฏิบัติ ข้อมูลที่วัดได้จากสนามย่อมมีค่าคลาดเคลื่อนสะสมเสมอ ไม่มีนักสำรวจคนใดที่วัดค่าได้สมบูรณ์แบบ 100% นั่นคือเหตุผลที่เราต้องเรียนรู้ การปรับแก้วงรอบสำรวจ (Traverse Adjustment) — กระบวนการกระจายค่าคลาดเคลื่อนออกไปอย่างเป็นระบบเพื่อให้ผลลัพธ์สุดท้ายมีความถูกต้องเชื่อถือได้
วงรอบสำรวจคืออะไร?
วงรอบสำรวจ คือการเชื่อมโยงชุดของจุดสำรวจ (Traverse Station) ต่อกันเป็นลำดับ โดยวัดทั้งมุมและระยะทางระหว่างแต่ละจุด ข้อมูลเหล่านี้จะถูกนำมาคำนวณพิกัดของจุดแต่ละจุดในระบบพิกัดที่กำหนด
วงรอบสำรวจแบ่งออกเป็น 2 ประเภทหลัก:
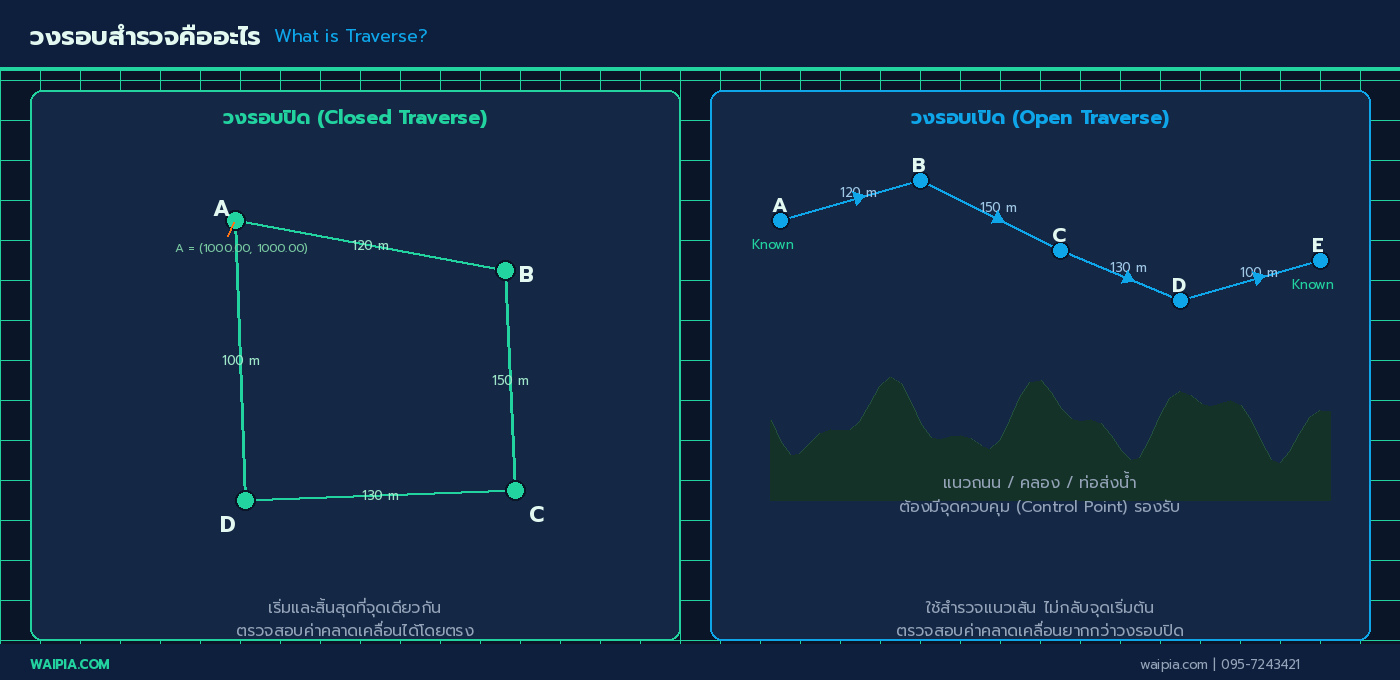
วงรอบปิด (Closed Traverse)
วงรอบที่เริ่มต้นและสิ้นสุดที่จุดเดียวกัน หรือจุดที่ทราบพิกัดแน่นอนทั้งสองปลาย ข้อดีคือสามารถตรวจสอบค่าคลาดเคลื่อนได้โดยตรง เพราะเมื่อคำนวณครบรอบแล้ว ผลรวมต้องปิดครบ ตัวอย่างเช่น การสำรวจขอบเขตแปลงที่ดินเป็นรูปหลายเหลี่ยมกลับมาจุดเริ่มต้น
วงรอบเปิด (Open Traverse)
วงรอบที่เริ่มต้นจากจุดหนึ่งและสิ้นสุดที่อีกจุดหนึ่งโดยไม่กลับมา มักใช้ในงานสำรวจแนวเส้น เช่น แนวถนน คลอง หรือท่อส่งน้ำ ข้อเสียคือตรวจสอบค่าคลาดเคลื่อนได้ยากกว่า จึงควรใช้กับเส้นทางที่มีจุดควบคุม (Control Point) รองรับ
ค่าคลาดเคลื่อนของวงรอบสำรวจ
ก่อนจะปรับแก้ได้ ต้องรู้ว่ามีค่าคลาดเคลื่อนอะไรบ้าง และค่าเหล่านั้นมาจากไหน
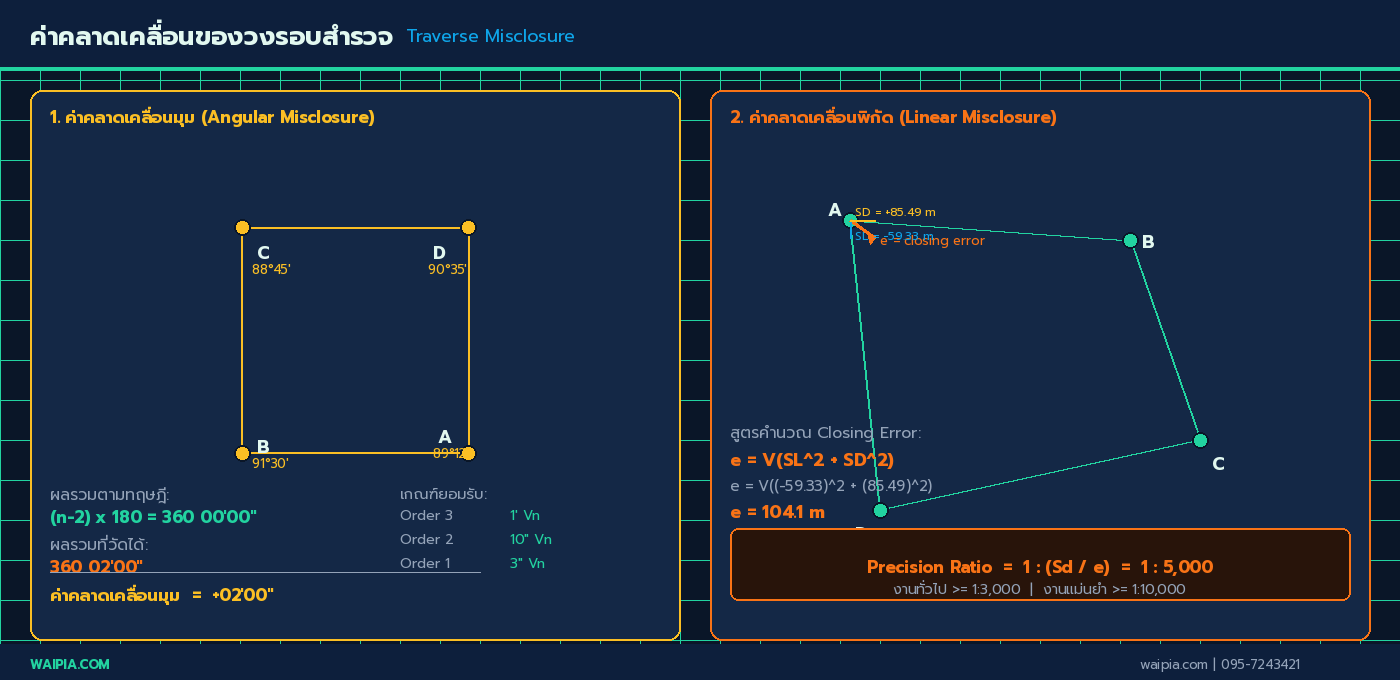
1. ค่าคลาดเคลื่อนมุม (Angular Misclosure)
สำหรับวงรอบปิด ผลรวมมุมภายในของรูปหลายเหลี่ยม n ด้าน ต้องเท่ากับ (n-2) × 180° เสมอตามทฤษฎีเรขาคณิต หากผลรวมที่วัดได้ไม่ตรงตามนี้ ส่วนต่างที่เหลือคือ ค่าคลาดเคลื่อนมุม
Angular Misclosure = ผลรวมมุมที่วัดได้ - (n-2) × 180°
โดยทั่วไปค่าคลาดเคลื่อนมุมที่ยอมรับได้ขึ้นอยู่กับระดับความแม่นยำ:
- งานทั่วไป (Order 3): ≤ 1' √n
- งานแม่นยำ (Order 2): ≤ 10" √n
- งานควบคุมสูง (Order 1): ≤ 3" √n
2. ค่าคลาดเคลื่อนพิกัด (Linear Misclosure)
หลังจากปรับมุมแล้ว นำค่ามุมและระยะทางมาคำนวณค่าผลต่างพิกัด (Departure และ Latitude) ในวงรอบปิด ผลรวมทั้งหมดต้องเท่ากับศูนย์ แต่ในทางปฏิบัติจะเหลือค่าต่างเล็กน้อย เรียกว่า:
- ΣLatitude (ΣL) — ผลรวมค่าเหนือ-ใต้ของทุกช่วง ควรเป็น 0
- ΣDeparture (ΣD) — ผลรวมค่าออก-ตก (ตะวันออก-ตะวันตก) ของทุกช่วง ควรเป็น 0
ค่าคลาดเคลื่อนพิกัดรวม (Closing Error):
e = √(ΣL² + ΣD²)
3. อัตราส่วนความแม่นยำ (Precision Ratio)
ใช้บอกระดับความถูกต้องของการวัด:
Precision = e / Σ距离รวมทุกช่วง = 1 / (Σdist / e)
ตัวอย่างเช่น 1:5,000 หมายความว่าทุกระยะ 5,000 เมตรมีค่าคลาดเคลื่อน 1 เมตร งานสำรวจทั่วไปควรได้ 1:3,000 ขึ้นไป งานแม่นยำสูงควรได้ 1:10,000 ขึ้นไป
วิธีการปรับแก้วงรอบสำรวจ
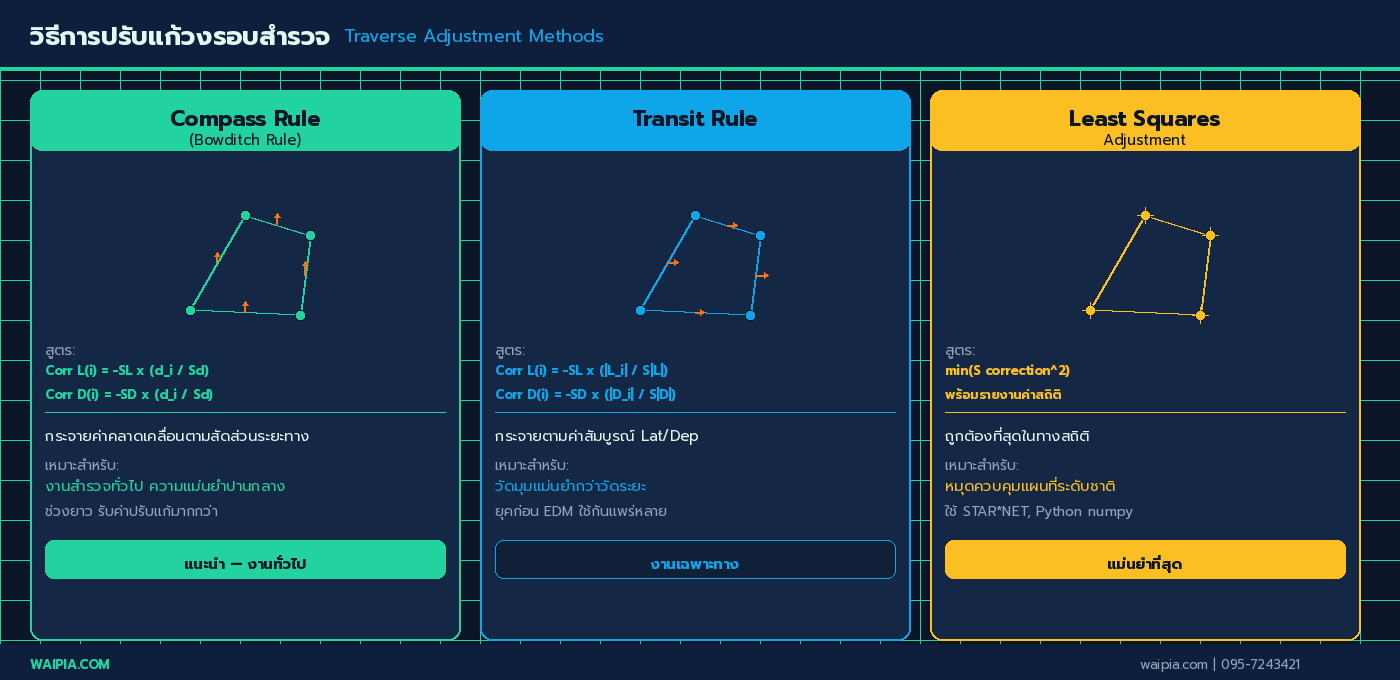
มี 3 วิธีหลักที่ใช้กันทั่วไปในวงการสำรวจ แต่ละวิธีมีความเหมาะสมต่างกัน
วิธีที่ 1: Compass Rule (Bowditch Rule)
เป็นวิธีที่นิยมมากที่สุดในการสำรวจทั่วไป อาศัยสมมติฐานว่า ค่าคลาดเคลื่อนในแต่ละช่วงมีสัดส่วนตามระยะทาง กล่าวคือ ช่วงที่ยาวกว่าจะรับค่าปรับแก้มากกว่า
สูตรการปรับแก้:
Correction L(i) = -ΣL × (d_i / Σd)
Correction D(i) = -ΣD × (d_i / Σd)
โดยที่:
d_i= ระยะทางของช่วงที่ iΣd= ระยะทางรวมทั้งหมดΣL= ผลรวม Latitude ที่คลาดเคลื่อนΣD= ผลรวม Departure ที่คลาดเคลื่อน
ข้อดี: ใช้ง่าย เหมาะกับงานที่ความแม่นยำในการวัดมุมและระยะทางใกล้เคียงกัน
วิธีที่ 2: Transit Rule
สมมติฐานของวิธีนี้คือ การวัดมุมแม่นยำกว่าการวัดระยะทาง ดังนั้นจึงกระจายค่าปรับแก้ตามสัดส่วนของค่าสัมบูรณ์ของ Latitude และ Departure
Correction L(i) = -ΣL × (|L_i| / Σ|L|)
Correction D(i) = -ΣD × (|D_i| / Σ|D|)
เหมาะสำหรับ: งานสำรวจที่ใช้เครื่องมือวัดมุมแม่นยำสูง แต่ระยะทางวัดด้วยวิธีทั่วไป เช่น งานในยุคก่อนที่จะมี EDM ที่แม่นยำ
วิธีที่ 3: Least Squares Adjustment
วิธีกำลังสองน้อยที่สุด เป็นวิธีที่ถูกต้องที่สุดในทางสถิติ กระจายค่าคลาดเคลื่อนโดยให้ผลรวมของกำลังสองของค่าปรับแก้มีค่าน้อยที่สุด
วิธีนี้เหมาะกับงานที่ต้องการความแม่นยำสูงมาก เช่น งานหมุดควบคุมแผนที่ระดับชาติ งานโครงสร้างขนาดใหญ่ ปัจจุบันมีซอฟต์แวร์ช่วยคำนวณ เช่น STAR*NET, MicroSurvey, หรือ Python library อย่าง numpy สามารถทำ Least Squares ได้
ขั้นตอนการปรับแก้วงรอบด้วย Compass Rule
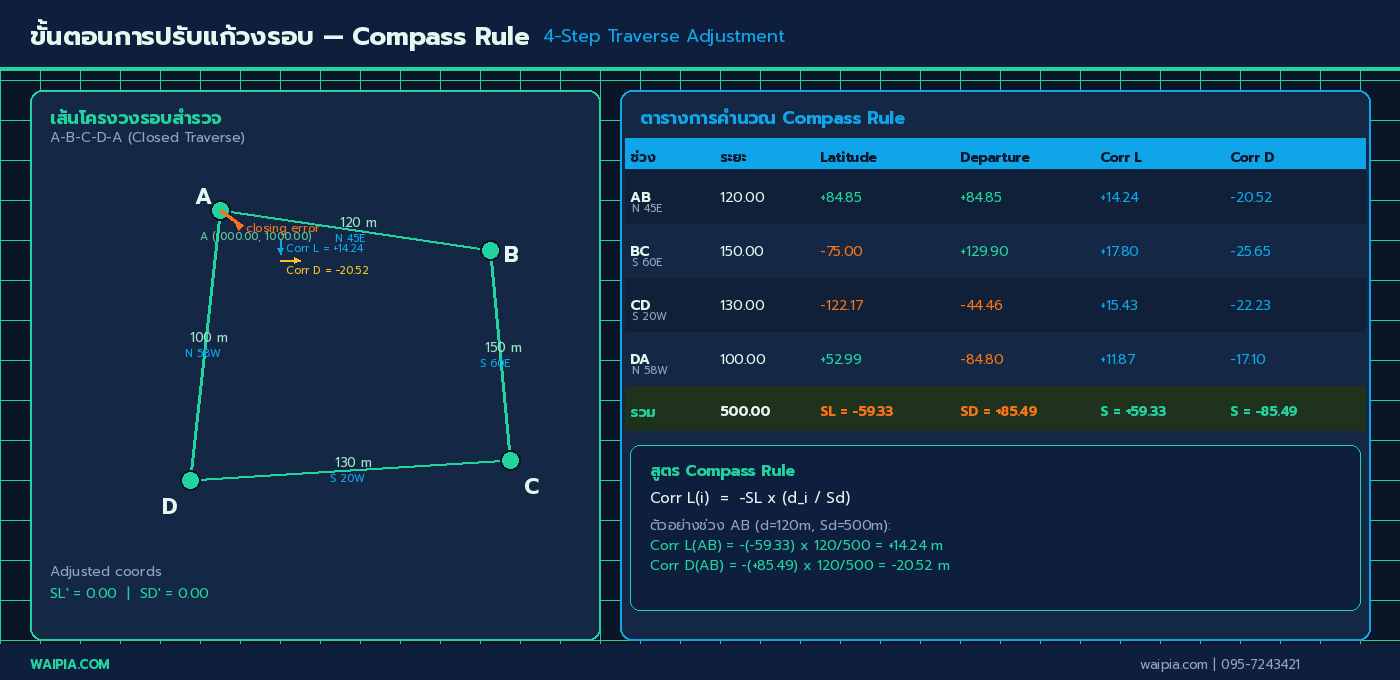
ขอยกตัวอย่างวงรอบ 4 จุด A→B→C→D→A เพื่อให้เห็นภาพขั้นตอนชัดเจน
ขั้นตอนที่ 1: ตรวจสอบและปรับมุม
สมมติวัดมุมภายในได้: 89°12', 91°30', 88°45', 90°35'
ผลรวมมุมที่วัดได้ = 360°02'
ผลรวมตามทฤษฎี (n=4) = (4-2) × 180° = 360°00'
ค่าคลาดเคลื่อนมุม = 360°02' - 360°00' = +02'
ปรับแก้มุมละ -02'/4 = -00°00'30" ต่อมุม
ขั้นตอนที่ 2: คำนวณ Latitude และ Departure
นำมุมบอกทิศ (Bearing) และระยะทาง (Distance) ของแต่ละช่วงมาคำนวณ:
Latitude = Distance × cos(Bearing)
Departure = Distance × sin(Bearing)
ตัวอย่างตาราง (ค่าสมมติ):
| ช่วง | ระยะทาง (m) | Bearing | Latitude (m) | Departure (m) |
|---|---|---|---|---|
| AB | 120.00 | N 45°E | +84.85 | +84.85 |
| BC | 150.00 | S 60°E | -75.00 | +129.90 |
| CD | 130.00 | S 20°W | -122.17 | -44.46 |
| DA | 100.00 | N 58°W | +52.99 | -84.80 |
| **รวม** | **500.00** | **-59.33** | **+85.49** |
หมายเหตุ: ค่าตัวเลขข้างต้นเป็นค่าสมมติเพื่อแสดงขั้นตอน
ΣL = -59.33 ม., ΣD = +85.49 ม. (ไม่ใช่ศูนย์ → มีค่าคลาดเคลื่อน)
ขั้นตอนที่ 3: คำนวณค่าปรับแก้ด้วย Compass Rule
สำหรับช่วง AB (ระยะทาง 120 ม.):
Corr L(AB) = -(-59.33) × (120/500) = +14.24 ม.
Corr D(AB) = -(+85.49) × (120/500) = -20.52 ม.
ทำซ้ำสำหรับทุกช่วง แล้วนำค่าปรับแก้บวกเข้ากับ Latitude และ Departure เดิม
ขั้นตอนที่ 4: คำนวณพิกัดสุดท้าย
กำหนดพิกัดจุดเริ่มต้น A = (N 1000.00, E 1000.00) แล้วบวก Latitude/Departure ที่ปรับแก้แล้วสะสมไปเรื่อยๆ
พิกัด B = A + (L'_AB, D'_AB)
พิกัด C = B + (L'_BC, D'_BC)
พิกัด D = C + (L'_CD, D'_CD)
กลับ A = D + (L'_DA, D'_DA) ← ต้องได้ N 1000.00, E 1000.00 พอดี
ข้อควรระวังในการปรับแก้วงรอบ
งานสำรวจมีหลายปัจจัยที่ส่งผลต่อคุณภาพของวงรอบก่อนถึงขั้นปรับแก้ การใส่ใจตั้งแต่ต้นจะช่วยให้ผลลัพธ์น่าเชื่อถือยิ่งขึ้น
ตรวจสอบก่อนปรับ: หากค่าคลาดเคลื่อนมุมเกินเกณฑ์ที่กำหนด ห้ามปรับแก้แล้วใช้งาน ต้องกลับไปวัดใหม่ในสนาม การปรับแก้ไม่ใช่การ "ซ่อน" ความผิดพลาด
Outlier ในข้อมูล: หากช่วงใดช่วงหนึ่งมีค่าคลาดเคลื่อนกระจุกตัวผิดปกติ อาจมีข้อผิดพลาดหยาบ (Blunder) เช่น อ่านค่ามุมผิด บันทึกผิด ควรตรวจสอบก่อนนำไปปรับแก้
เลือกวิธีให้เหมาะงาน: Compass Rule เหมาะกับงานทั่วไปส่วนใหญ่ Least Squares เหมาะกับงานที่ต้องการความแม่นยำสูง และต้องรายงานค่าสถิติของความคลาดเคลื่อน
ซอฟต์แวร์ช่วยคำนวณ: ปัจจุบันมีโปรแกรมมาตรฐานอย่าง Leica Infinity, Trimble Business Center, หรือแม้แต่ Excel ที่เขียนสูตรเองได้ช่วยให้คำนวณรวดเร็วและลดข้อผิดพลาด
สรุป

การปรับแก้วงรอบสำรวจไม่ใช่เพียงแค่คณิตศาสตร์ แต่คือกระบวนการตรวจสอบคุณภาพงานสำรวจทั้งหมด วิศวกรสำรวจที่ดีต้องเข้าใจทั้งหลักการเลือกวิธีปรับแก้ที่เหมาะสม และรู้จักตีความค่าคลาดเคลื่อนว่าอยู่ในเกณฑ์ที่ยอมรับได้หรือไม่
สรุปหลักการง่ายๆ:
- ปรับมุมก่อน → กระจายค่าคลาดเคลื่อนมุมให้เท่ากันทุกมุม
- คำนวณ Latitude & Departure ใหม่จากมุมที่ปรับแล้ว
- ตรวจสอบ Precision Ratio ว่าผ่านเกณฑ์
- ปรับพิกัดด้วย Compass Rule หรือวิธีที่เหมาะสม
- คำนวณพิกัดสุดท้ายตามลำดับ
หากต้องการคำปรึกษาเรื่องงานสำรวจ การเลือกเครื่องมือ GNSS/Total Station หรือซอฟต์แวร์สำหรับงานวงรอบสำรวจ ติดต่อทีมงาน WAIPIA Development ได้เลยครับ
บริษัท ไวเปีย ดีเวลลอปเม้นท์ จำกัด 📞 095-7243421 | Line OA: @info_wd | 🌐 waipia.com