GNSS RTK คืออะไร? เข้าใจหลักการ RTK, Network RTK และ PPK

คุณเคยสงสัยไหมว่า ทำไมเครื่องรับสัญญาณ GPS บางตัวถึงให้ความแม่นยำระดับเซนติเมตร ในขณะที่ GPS ในมือถือของเราให้ความแม่นยำแค่ระดับ 3–5 เมตร? คำตอบอยู่ที่เทคโนโลยี GNSS RTK ซึ่งเป็นหัวใจสำคัญของงานสำรวจสมัยใหม่ที่ต้องการความละเอียดสูง ไม่ว่าจะเป็นงานรังวัดที่ดิน งานก่อสร้าง หรืองานวางผังเมือง
ในบทความนี้ เราจะพาคุณทำความเข้าใจตั้งแต่พื้นฐาน GNSS ไปจนถึงเทคนิค RTK, Network RTK และ PPK พร้อมเปรียบเทียบว่าเทคนิคไหนเหมาะกับงานแบบไหน เพื่อให้คุณเลือกใช้ได้อย่างมั่นใจ
GNSS คืออะไร? ทำไมไม่เรียกแค่ GPS
หลายคนคุ้นเคยกับคำว่า GPS แต่ในวงการสำรวจเรามักใช้คำว่า GNSS (Global Navigation Satellite System) แทน เพราะ GPS เป็นเพียงระบบดาวเทียมนำทางของสหรัฐอเมริกาเพียงระบบเดียว ในขณะที่ GNSS ครอบคลุมทุกระบบดาวเทียมนำทางที่มีอยู่ในปัจจุบัน ได้แก่
- GPS (สหรัฐอเมริกา) — ระบบดั้งเดิมที่มีดาวเทียมประมาณ 31 ดวง
- GLONASS (รัสเซีย) — ดาวเทียมประมาณ 24 ดวง
- Galileo (สหภาพยุโรป) — ดาวเทียมประมาณ 30 ดวง ให้ความแม่นยำสูง
- BeiDou (จีน) — ดาวเทียมมากกว่า 40 ดวง ครอบคลุมภูมิภาคเอเชียได้ดีเป็นพิเศษ
เครื่องรับ GNSS สมัยใหม่สามารถรับสัญญาณจากหลายระบบพร้อมกัน (Multi-constellation) ทำให้มีจำนวนดาวเทียมที่ใช้งานได้มากขึ้น ส่งผลให้การคำนวณตำแหน่งมีความแม่นยำและเสถียรมากกว่าการใช้ GPS เพียงระบบเดียว โดยเฉพาะในสภาพแวดล้อมที่มีสิ่งกีดขวาง เช่น ในเมืองที่มีตึกสูงหรือในพื้นที่ป่าทึบ
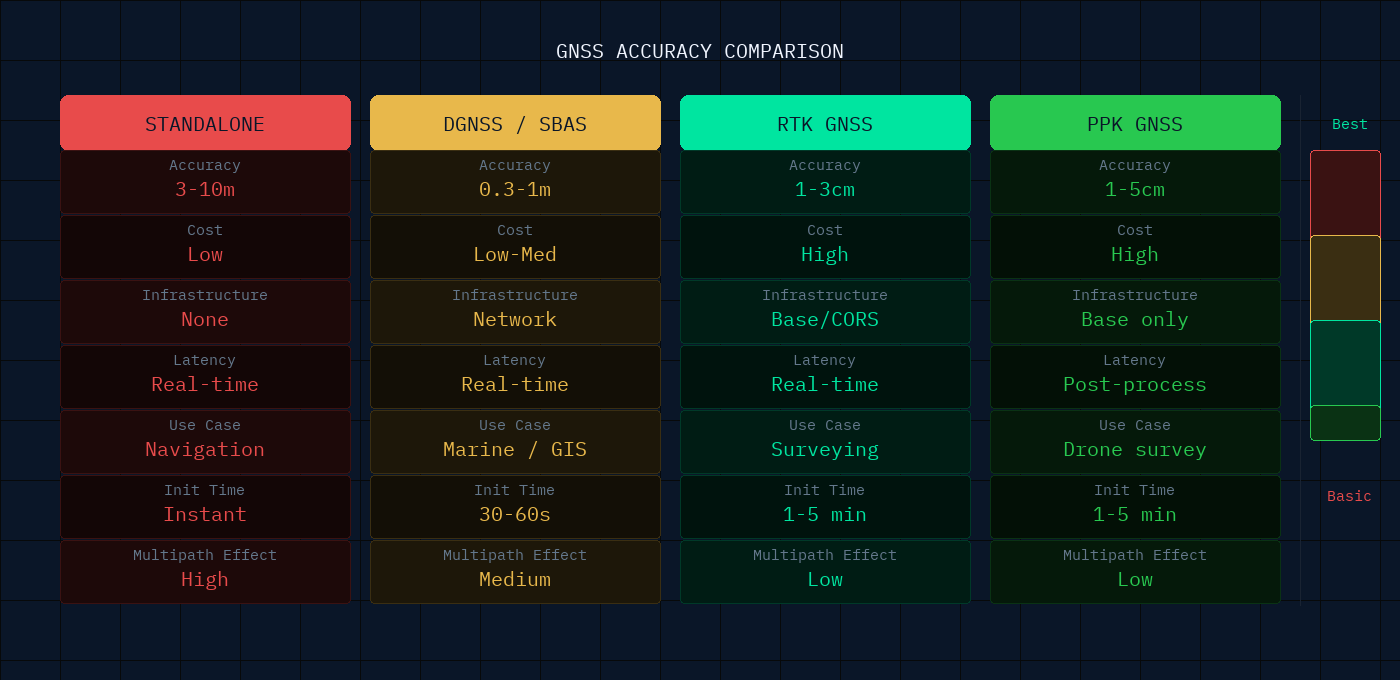
ความแม่นยำของ GNSS แบบปกติ
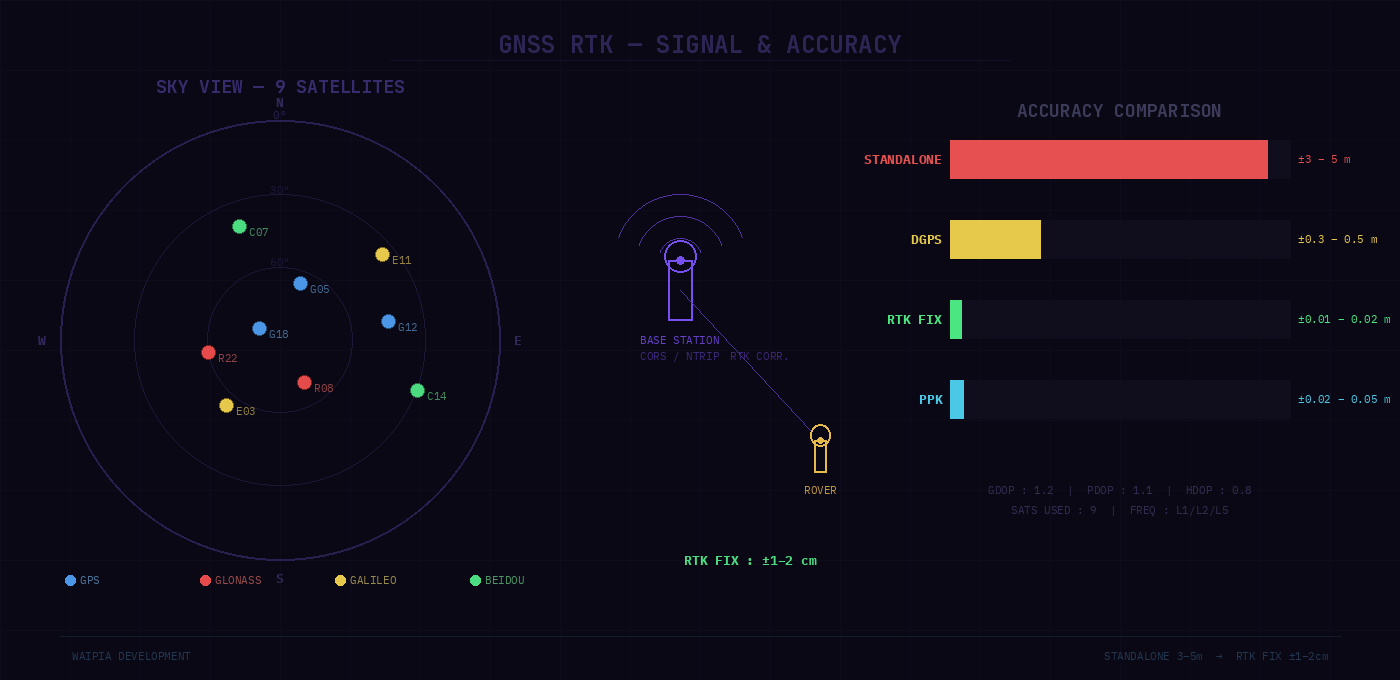
หากใช้เครื่องรับ GNSS แบบ standalone (ไม่มีการแก้ค่า) จะได้ความแม่นยำประมาณ 2–5 เมตร ซึ่งเพียงพอสำหรับการนำทางทั่วไป แต่ไม่เพียงพอสำหรับงานสำรวจที่ต้องการความละเอียดระดับเซนติเมตร นี่คือเหตุผลที่เราต้องใช้เทคนิคเสริม เช่น RTK หรือ PPK
RTK คืออะไร? หลักการทำงาน Real-Time Kinematic
RTK (Real-Time Kinematic) เป็นเทคนิคการรังวัดด้วย GNSS ที่สามารถให้ความแม่นยำระดับ 1–2 เซนติเมตร ในแบบ Real-Time ได้ทันที โดยใช้หลักการวัดเฟสของคลื่นพาห์ (Carrier Phase) แทนการวัดรหัส (Code) แบบ GPS ทั่วไป
หลักการทำงานของ RTK
RTK ทำงานโดยใช้เครื่องรับ GNSS 2 เครื่องพร้อมกัน ได้แก่
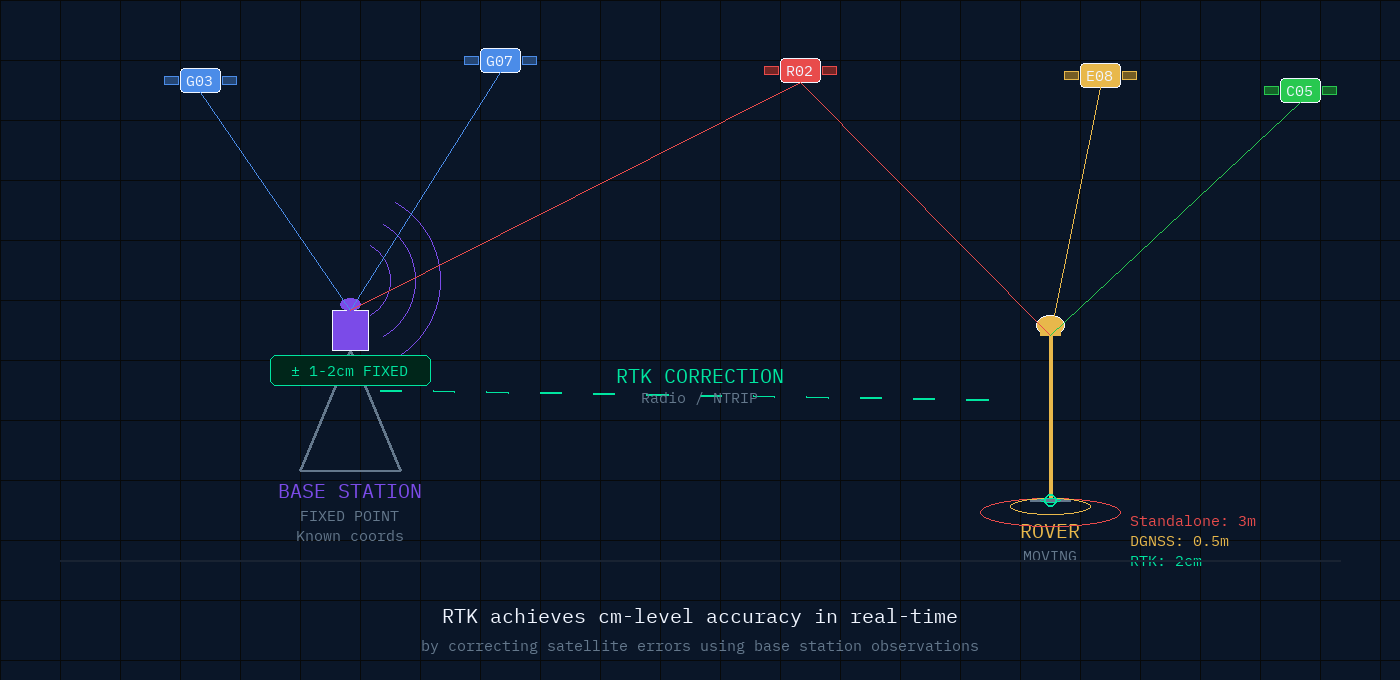
- Base Station (สถานีฐาน) — ตั้งอยู่ณจุดที่ทราบค่าพิกัดแน่นอน ทำหน้าที่รับสัญญาณดาวเทียมและคำนวณค่าแก้ (Correction Data)
- Rover (เครื่องรับเคลื่อนที่) — เครื่องที่เราถือไปวัดในสนาม รับทั้งสัญญาณดาวเทียมและค่าแก้จาก Base Station
กระบวนการทำงานเป็นดังนี้ Base Station จะรับสัญญาณดาวเทียมและส่งค่าแก้ไปยัง Rover ผ่านวิทยุ (UHF Radio) หรืออินเทอร์เน็ต (NTRIP) แบบ Real-Time จากนั้น Rover จะนำค่าแก้มาประมวลผลร่วมกับสัญญาณที่ตัวเองรับได้ เพื่อกำจัดค่าคลาดเคลื่อนต่างๆ เช่น ค่าคลาดเคลื่อนจากชั้นบรรยากาศ (Ionosphere/Troposphere) และค่าคลาดเคลื่อนจากวงโคจรดาวเทียม
สถานะการรังวัด (Solution Status)
เมื่อใช้งาน RTK คุณจะเห็นสถานะการรังวัดบนหน้าจอเครื่องรับ ซึ่งบอกถึงระดับความแม่นยำ
- Fixed — สถานะที่ดีที่สุด ค่าความคลาดเคลื่อนอยู่ที่ 1–2 ซม. แสดงว่าเครื่องสามารถแก้ค่า Integer Ambiguity ได้สำเร็จ
- Float — ยังแก้ค่า Ambiguity ไม่สำเร็จ ความแม่นยำอยู่ที่ประมาณ 20–50 ซม. ไม่ควรใช้สำหรับงานที่ต้องการความแม่นยำสูง
- Single/Autonomous — ไม่ได้รับค่าแก้จาก Base ความแม่นยำเทียบเท่า GNSS ปกติ (2–5 เมตร)
ในงานสำรวจ เราจะรอจนกว่าสถานะจะเป็น Fixed ก่อนจึงจะบันทึกค่าพิกัด
ข้อจำกัดของ RTK แบบดั้งเดิม
แม้ RTK จะให้ความแม่นยำสูง แต่ก็มีข้อจำกัดที่ควรรู้ ข้อแรกคือ ระยะห่างจาก Base Station ไม่ควรเกิน 10–15 กิโลเมตร เพราะหากไกลเกินไป ค่าคลาดเคลื่อนจากชั้นบรรยากาศจะแตกต่างกันมากจนค่าแก้ไม่มีประสิทธิภาพ ข้อสองคือต้อง ตั้ง Base Station เอง ทุกครั้งที่ทำงาน ซึ่งเสียเวลาและต้องทราบค่าพิกัดของจุดตั้ง Base อย่างแม่นยำ ข้อสามคือ ต้องมีการสื่อสาร ระหว่าง Base กับ Rover ตลอดเวลา หากสัญญาณวิทยุหรืออินเทอร์เน็ตขาดหาย จะไม่สามารถรังวัดแบบ RTK ได้
Network RTK — CORS และ VRS ในประเทศไทย
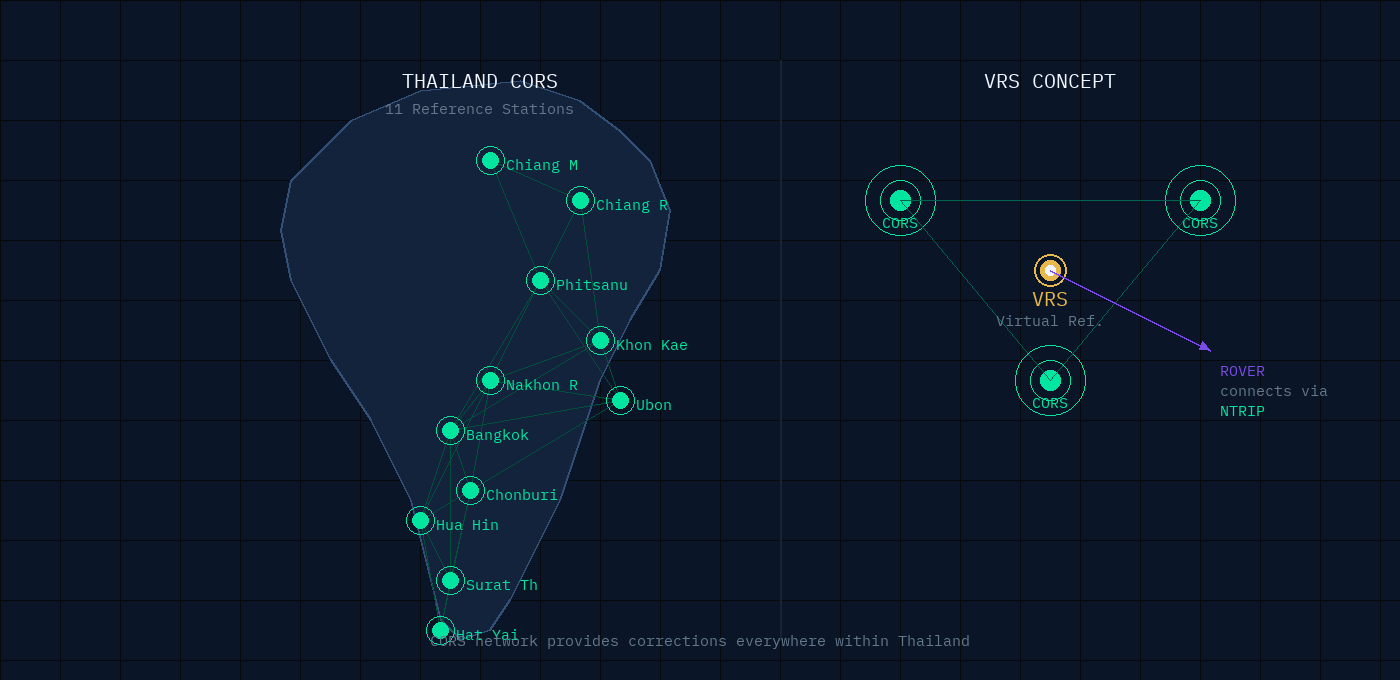
เพื่อแก้ข้อจำกัดของ RTK แบบดั้งเดิม จึงเกิดแนวคิด Network RTK ขึ้น โดยใช้เครือข่ายสถานีฐานถาวร (CORS — Continuously Operating Reference Station) ที่กระจายอยู่ทั่วประเทศ
หลักการทำงานของ Network RTK
แทนที่จะตั้ง Base Station เอง ผู้ใช้เพียงแค่เชื่อมต่อ Rover เข้ากับเครือข่าย CORS ผ่านอินเทอร์เน็ตมือถือ (3G/4G/5G) โดยใช้โปรโตคอล NTRIP (Networked Transport of RTCM via Internet Protocol) ระบบจะคำนวณค่าแก้ที่เหมาะสมกับตำแหน่งของ Rover โดยใช้ข้อมูลจากสถานี CORS หลายสถานีรอบข้าง
เทคนิคที่นิยมใช้ใน Network RTK ได้แก่
- VRS (Virtual Reference Station) — ระบบจะสร้างสถานีฐานเสมือนขึ้นใกล้ตำแหน่ง Rover แล้วส่งค่าแก้มาเสมือนว่ามี Base Station อยู่ใกล้ๆ
- MAC (Master-Auxiliary Concept) — ส่งค่าแก้จากสถานีหลักและค่าต่างจากสถานีรอง เพื่อให้ Rover คำนวณค่าแก้เอง
- FKP (Flächen-Korrektur-Parameter) — ส่ง correction parameter เป็นพื้นผิว (surface) ให้ Rover ใช้ interpolate ค่าแก้
บริการ CORS ในประเทศไทย
ในประเทศไทยมีผู้ให้บริการ CORS หลายราย ทั้งภาครัฐและเอกชน เช่น
- กรมแผนที่ทหาร (RTSD) — เครือข่าย CORS ครอบคลุมทั่วประเทศ
- กรมที่ดิน — ระบบ CORS สำหรับงานรังวัดที่ดิน
- ผู้ให้บริการเอกชน — เช่น ระบบ CORS จากผู้จำหน่ายเครื่องรับ GNSS ต่างๆ
ข้อดีของ Network RTK
Network RTK มีข้อดีเหนือกว่า RTK แบบดั้งเดิมหลายประการ คือไม่ต้องตั้ง Base Station เอง ทำให้ประหยัดเวลาและคนทำงาน เพียงคนเดียวก็ทำงานสำรวจได้ นอกจากนี้ ระยะทำงานไม่จำกัดเฉพาะรัศมีรอบ Base อีกต่อไป เพราะมีสถานี CORS กระจายทั่วพื้นที่ และค่าแก้จาก Network RTK ยังมีคุณภาพดีกว่าเพราะคำนวณจากหลายสถานี ทำให้แก้ค่าคลาดเคลื่อนจากชั้นบรรยากาศได้ดีขึ้น
PPK คืออะไร? เทียบกับ RTK ต่างกันอย่างไร
PPK (Post-Processing Kinematic) ใช้หลักการเดียวกับ RTK ทุกประการ แต่ต่างกันตรงที่ ไม่ต้องมีการสื่อสาร ระหว่าง Base กับ Rover ในขณะทำงานสนาม แต่จะนำข้อมูลดิบ (Raw Data) ของทั้ง Base และ Rover มาประมวลผลในสำนักงานภายหลัง
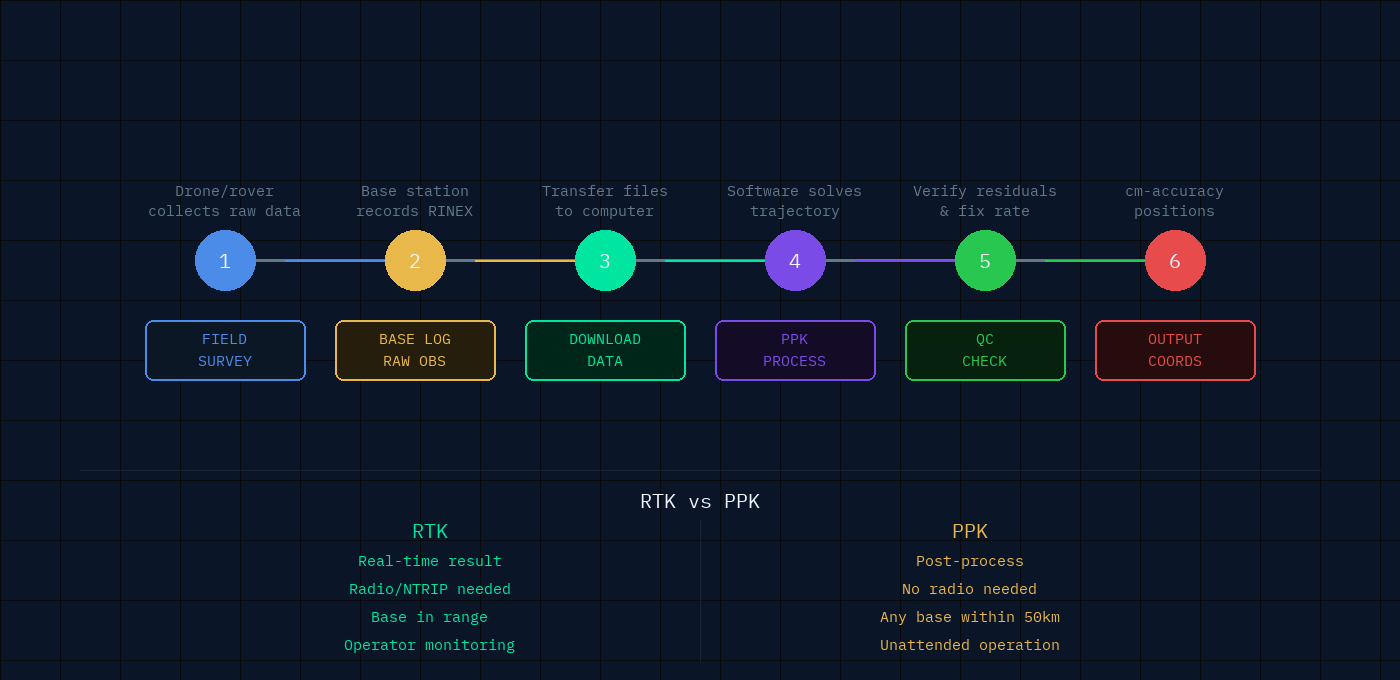
ขั้นตอนการทำงาน PPK
กระบวนการ PPK แบ่งเป็น 2 ขั้นตอนหลัก ขั้นตอนแรกคือ งานสนาม — ตั้ง Base Station บันทึกข้อมูลดิบ (Raw GNSS Data) พร้อมกับ Rover ที่เคลื่อนที่ไปวัดจุดต่างๆ โดยทั้ง Base และ Rover จะบันทึกข้อมูลดิบลงในหน่วยความจำของตัวเอง ไม่จำเป็นต้องมีสัญญาณวิทยุหรืออินเทอร์เน็ตระหว่างสองเครื่อง
ขั้นตอนที่สองคือ งานสำนักงาน — นำข้อมูลดิบจากทั้ง Base และ Rover มาประมวลผลด้วยซอฟต์แวร์เฉพาะทาง เช่น Trimble Business Center, Leica Infinity หรือซอฟต์แวร์โอเพนซอร์สอย่าง RTKLib ซอฟต์แวร์จะคำนวณค่าพิกัดที่แม่นยำโดยใช้ข้อมูลจากทั้งสองเครื่องร่วมกัน
ข้อดีของ PPK เหนือ RTK
PPK มีจุดเด่นหลายอย่างที่ RTK ทำไม่ได้ ข้อแรกคือ ไม่ต้องมีสัญญาณสื่อสาร ระหว่าง Base กับ Rover จึงทำงานได้แม้ในพื้นที่ห่างไกลที่ไม่มีสัญญาณโทรศัพท์ ข้อสองคือ ไม่สูญเสียข้อมูล เมื่อสัญญาณ RTK ขาดหาย เพราะข้อมูลถูกบันทึกไว้ทั้งหมดในหน่วยความจำ ข้อสามคือ ความแม่นยำเท่าเทียมหรือดีกว่า เพราะการประมวลผลแบบ Post-Processing สามารถใช้อัลกอริทึมที่ซับซ้อนกว่าและประมวลผลข้อมูลทั้ง Forward และ Reverse ได้
ข้อจำกัดของ PPK
อย่างไรก็ตาม PPK ก็มีข้อเสียที่ต้องพิจารณา คือ ไม่เห็นผลลัพธ์ในสนาม — คุณจะไม่รู้ว่าข้อมูลที่วัดมามีคุณภาพดีหรือไม่จนกว่าจะกลับมาประมวลผลที่สำนักงาน หากพบว่ามีปัญหา อาจต้องกลับไปวัดใหม่ นอกจากนี้ยังต้อง ใช้เวลาประมวลผล เพิ่มเติม และต้องมีความรู้ในการใช้ซอฟต์แวร์ประมวลผล
เปรียบเทียบ RTK vs Network RTK vs PPK เลือกใช้แบบไหนดี
การเลือกใช้เทคนิคไหนขึ้นอยู่กับลักษณะงานและเงื่อนไขในพื้นที่ สรุปเปรียบเทียบได้ดังนี้
| หัวข้อ | RTK แบบดั้งเดิม | Network RTK | PPK |
|---|---|---|---|
| ความแม่นยำ | 1–2 ซม. | 1–3 ซม. | 1–2 ซม. |
| ผลลัพธ์ | Real-Time | Real-Time | Post-Process |
| ต้องตั้ง Base | ใช่ | ไม่ (ใช้ CORS) | ใช่ |
| ต้องมีสัญญาณสื่อสาร | ใช่ | ใช่ (อินเทอร์เน็ต) | ไม่ |
| จำนวนคนทำงาน | 2+ คน | 1 คน | 2+ คน |
| เหมาะกับ | งานทั่วไป ระยะใกล้ | งานทั่วไป มีสัญญาณ 4G | พื้นที่ห่างไกล, Drone |
แนะนำการเลือกใช้ตามลักษณะงาน
สำหรับ งานรังวัดที่ดิน ในเขตเมืองหรือพื้นที่ที่มีสัญญาณอินเทอร์เน็ต แนะนำให้ใช้ Network RTK เพราะสะดวก รวดเร็ว ทำงานคนเดียวได้
สำหรับ งานก่อสร้าง ที่ต้องวางตำแหน่งตลอดทั้งวัน แนะนำ RTK แบบตั้ง Base เพราะเสถียรกว่าและไม่ขึ้นกับสัญญาณอินเทอร์เน็ต
สำหรับ งาน Drone Survey มักใช้ PPK เพราะ Drone ไม่สามารถรับค่าแก้ RTK ได้อย่างเสถียร (แม้ปัจจุบัน Drone หลายรุ่นจะรองรับ RTK แต่ PPK ยังให้ความมั่นใจในผลลัพธ์มากกว่า)
สำหรับ งานสำรวจในพื้นที่ห่างไกล ที่ไม่มีสัญญาณโทรศัพท์ ใช้ PPK เป็นทางเลือกที่ดีที่สุด
เคล็ดลับการทำงาน GNSS ในสนาม
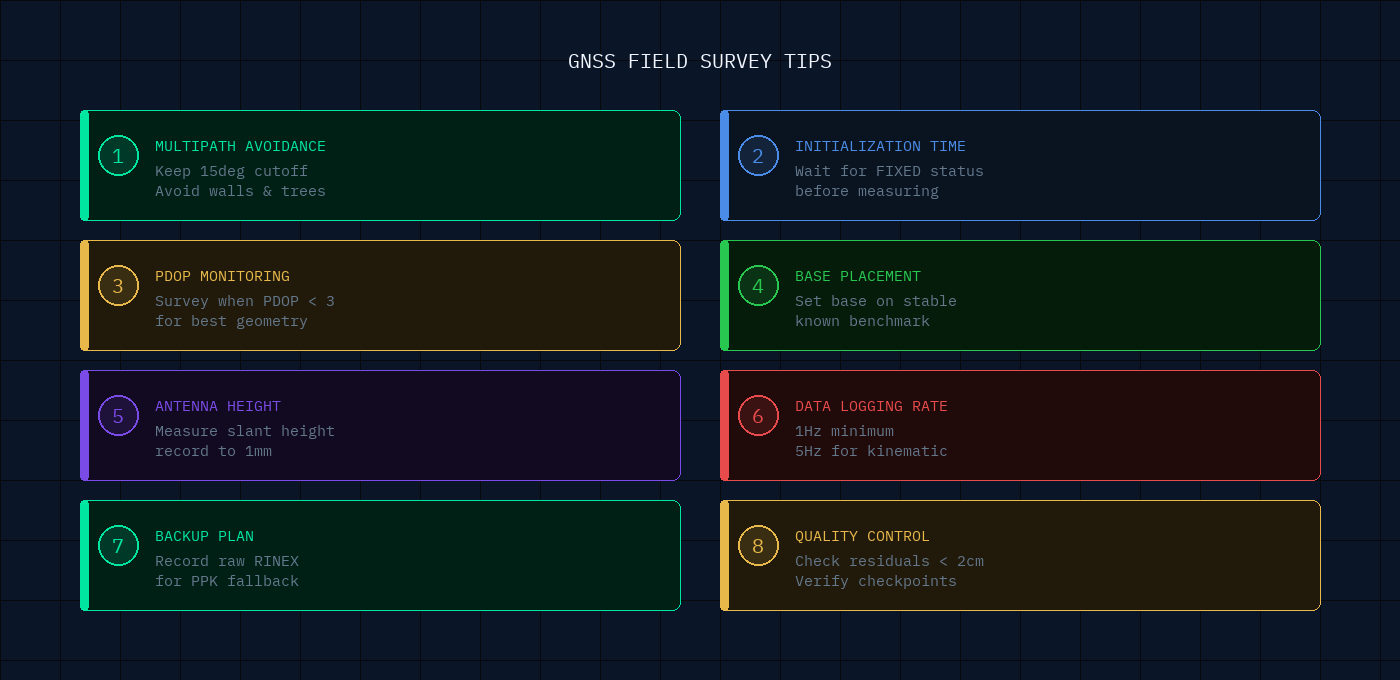
ไม่ว่าจะใช้เทคนิคไหน มีเคล็ดลับที่ช่วยให้การทำงาน GNSS ในสนามมีประสิทธิภาพมากขึ้น
วางแผนก่อนลงสนาม
ก่อนออกงาน ควรตรวจสอบ GNSS Planning เพื่อดูจำนวนดาวเทียมและค่า PDOP ในช่วงเวลาที่จะทำงาน หลีกเลี่ยงช่วงที่มีดาวเทียมน้อยหรือ PDOP สูง (มากกว่า 3) เพราะจะส่งผลต่อความแม่นยำ
หลีกเลี่ยงสิ่งกีดขวาง
สัญญาณ GNSS ต้องการท้องฟ้าโล่ง ควรหลีกเลี่ยงการวัดใกล้ตึกสูง ต้นไม้ใหญ่ หรือสิ่งก่อสร้างที่จะบังสัญญาณ โดยทั่วไปควรมี Elevation Mask ประมาณ 10–15 องศา หมายความว่ามองเห็นท้องฟ้าได้ตั้งแต่ 15 องศาจากขอบฟ้าขึ้นไป
บันทึกข้อมูลให้ครบ
ควรจดบันทึกข้อมูลเพิ่มเติมในสนามเสมอ เช่น ความสูงเสาอากาศ (Antenna Height) สถานะการรังวัด (Fix/Float) ค่า PDOP ในขณะวัด และจำนวนดาวเทียม ข้อมูลเหล่านี้จะช่วยในการตรวจสอบคุณภาพข้อมูลภายหลัง
ตรวจสอบด้วยจุดที่ทราบค่า
ก่อนเริ่มงานและหลังจบงาน ควรวัดที่ หมุดควบคุม (Control Point) ที่ทราบค่าพิกัดอย่างน้อย 1 จุด เพื่อตรวจสอบว่าระบบทำงานถูกต้อง หากค่าที่วัดได้แตกต่างจากค่าที่ทราบเกินกว่าค่าที่ยอมรับได้ ให้หาสาเหตุและแก้ไขก่อนทำงานต่อ
สรุป
GNSS RTK เป็นเทคโนโลยีที่เปลี่ยนแปลงวงการสำรวจอย่างมาก ทำให้การรังวัดที่เคยใช้เวลาเป็นชั่วโมงสามารถทำเสร็จได้ในไม่กี่วินาทีด้วยความแม่นยำระดับเซนติเมตร การทำความเข้าใจหลักการทำงานของ RTK, Network RTK และ PPK จะช่วยให้คุณเลือกใช้เทคนิคที่เหมาะสมกับงานแต่ละประเภท ทำงานได้อย่างมีประสิทธิภาพและมั่นใจในผลลัพธ์
หากคุณสนใจเรื่องระบบพิกัดที่ใช้ร่วมกับ GNSS ในประเทศไทย สามารถอ่านเพิ่มเติมได้ที่บทความ ระบบพิกัดแผนที่ประเทศไทย: WGS84, TM และ UTM ต่างกันอย่างไร?
ต้องการคำปรึกษาเรื่อง GNSS หรือเครื่องมือสำรวจ? ติดต่อ บริษัท ไวเปีย ดีเวลลอปเม้นท์ จำกัด (Waipia Development) โทร. 095-7243421 | Line OA: @info_wd | เว็บไซต์: waipia.com