SLAM คืออะไร? เทคโนโลยีหัวใจของ Mobile LiDAR และ Handheld Scanner

ถ้าคุณเคยเห็นช่างสำรวจถือเครื่องสแกนเดินไปรอบอาคาร หรือเห็นรถติด LiDAR ขับผ่านถนนแล้วได้ point cloud ออกมาทั้งเมือง — เบื้องหลังเทคโนโลยีนั้นคือ SLAM ที่ทำให้เครื่องสแกนรู้ว่าตัวเองอยู่ตรงไหนได้โดยไม่ต้องพึ่ง GPS
สำหรับวิศวกรสำรวจที่คุ้นเคยกับ Total Station และ GNSS RTK บทความนี้จะอธิบายว่า SLAM ทำงานอย่างไร, ใช้กับเครื่องมืออะไรบ้าง, ความแม่นยำเทียบกับ Static LiDAR เป็นอย่างไร และเมื่อไหร่ควรเลือกใช้ SLAM แทนวิธีดั้งเดิม
SLAM คืออะไร?
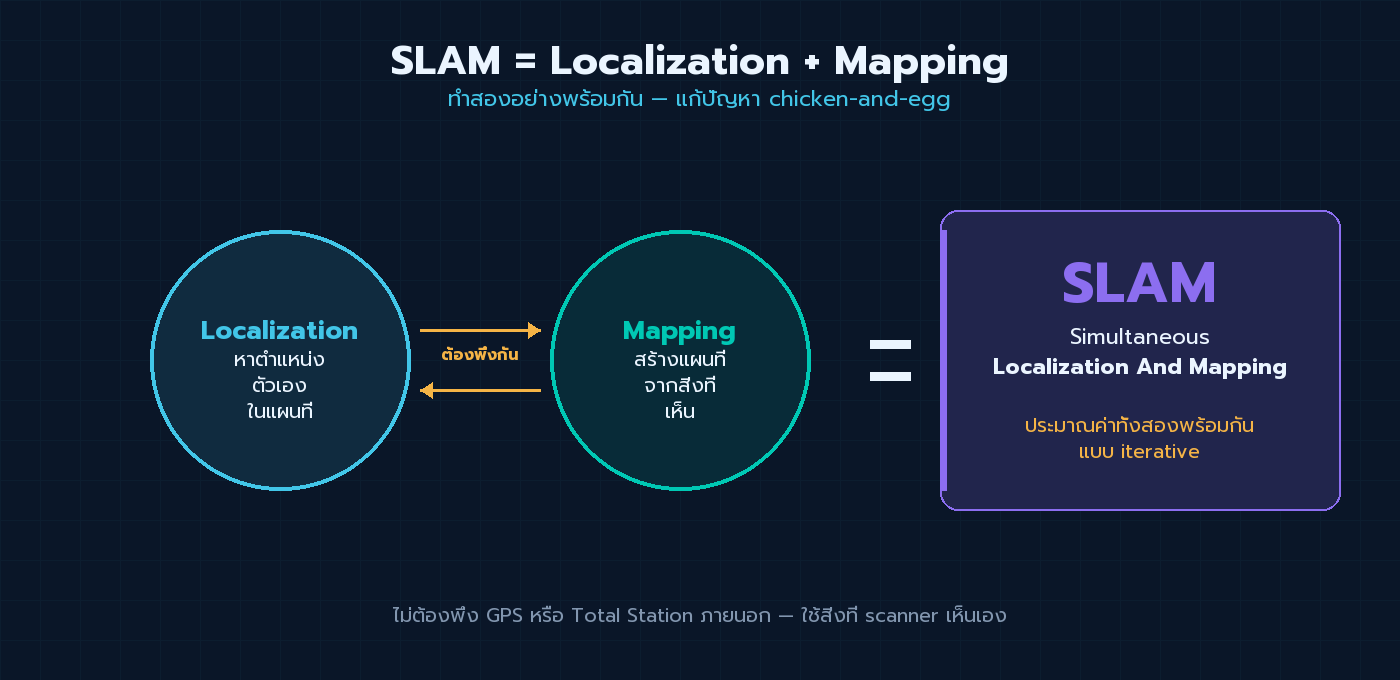
SLAM ย่อมาจาก Simultaneous Localization And Mapping หรือ "การหาตำแหน่งและสร้างแผนที่ไปพร้อมกัน"
แนวคิดของ SLAM คือ — ถ้าคุณอยู่ในห้องที่ไม่เคยเห็นมาก่อน และไม่มี GPS, ไม่มี Total Station ตั้งอยู่ คุณจะสร้างแผนที่ห้องนี้ได้อย่างไร?
คำตอบคือ: คุณต้องทำสองอย่าง พร้อมกัน
- สร้างแผนที่ จากสิ่งที่คุณเห็น (Mapping)
- รู้ว่าตัวเองอยู่ตรงไหนในแผนที่ ที่กำลังสร้าง (Localization)
ปัญหาคือ — ถ้าไม่รู้ตำแหน่งตัวเอง จะสร้างแผนที่ไม่ได้ และถ้าไม่มีแผนที่ ก็จะรู้ตำแหน่งไม่ได้ มันเป็นปัญหา chicken-and-egg ที่ SLAM แก้ด้วยการประมาณค่าทั้งสองพร้อมกันแบบ iterative
ทำไมงานสำรวจถึงต้องใช้ SLAM?
ในงานสำรวจดั้งเดิม เรารู้ตำแหน่งเครื่องมือเสมอ — Total Station มี Backsight, GNSS RTK มี Base Station ส่งค่าแก้ แต่ในสภาพแวดล้อมเหล่านี้ วิธีดั้งเดิมใช้ไม่ได้:
- ในอาคาร / ใต้ดิน / อุโมงค์ — GPS ใช้ไม่ได้, ตั้ง Total Station ทุก 30 เมตรช้ามาก
- ป่าทึบ / canopy หนา — สัญญาณ GNSS แย่มาก
- โรงงานที่มีโครงเหล็กเยอะ — Multipath ทำให้ RTK ไม่ fix
- งานที่ต้องการความเร็ว — เช่น เก็บข้อมูลทั้งโรงงานใน 1 วัน
SLAM ตอบโจทย์ทั้งหมดนี้ได้เพราะ ไม่ต้องพึ่งสัญญาณภายนอก มันใช้สิ่งที่เครื่องสแกนเห็นเองมาคำนวณตำแหน่ง
หลักการทำงานของ SLAM
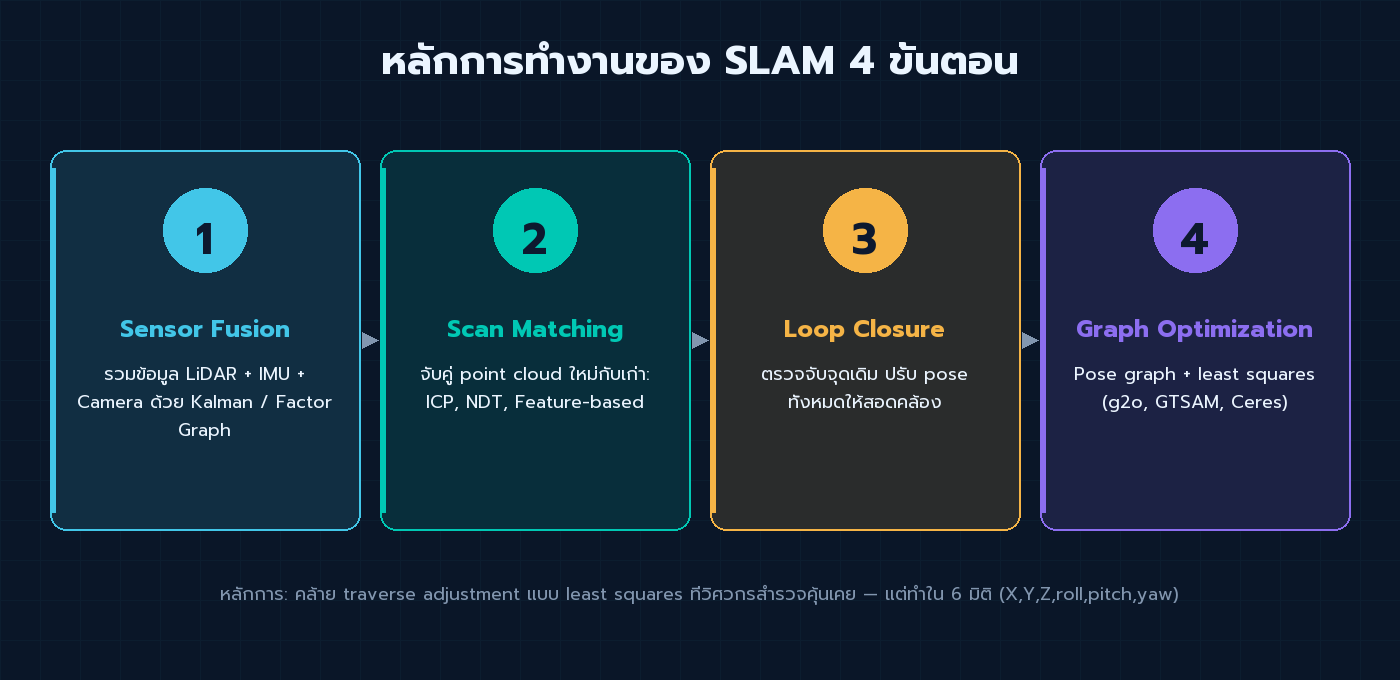
1. Sensor Fusion — รวมข้อมูลจากหลาย sensor
SLAM ที่ใช้งานจริงไม่ได้พึ่ง sensor เดียว แต่รวมข้อมูลจาก:
- LiDAR — วัดระยะ 3D รอบตัวด้วยเลเซอร์ ความแม่น mm-cm
- IMU (Inertial Measurement Unit) — accelerometer + gyroscope บอกการเคลื่อนไหว/หมุน
- Camera — ภาพ RGB ใช้จับ visual feature (สำหรับ Visual SLAM)
- GNSS (ถ้ามี) — ให้ตำแหน่งหยาบใน global coordinate
- Wheel Odometry (กรณีรถ) — วัดระยะจากการหมุนล้อ
แต่ละ sensor มีข้อจำกัด — IMU drift เมื่อเวลาผ่านไป, LiDAR ไม่ได้ให้สี, Camera แย่ในที่มืด — ดังนั้น SLAM จะ fuse ข้อมูลทั้งหมดด้วย Kalman Filter หรือ Factor Graph เพื่อให้ได้ pose ที่แม่นที่สุด
2. Scan Matching — จับคู่ข้อมูลใหม่กับข้อมูลเก่า
ทุกครั้งที่ LiDAR สแกน frame ใหม่ SLAM จะ match point cloud ใหม่กับ point cloud ที่สะสมมาก่อนหน้า ด้วยอัลกอริทึม:
- ICP (Iterative Closest Point) — จับคู่จุดที่ใกล้ที่สุดแล้วหา transformation
- NDT (Normal Distributions Transform) — แบ่ง point cloud เป็น cell แล้วเทียบ Gaussian distribution
- Feature-based matching — ดึง feature เด่น (มุม, ขอบ, ระนาบ) แล้วจับคู่
จาก transformation ที่ได้ — SLAM รู้ว่าเครื่องสแกนเคลื่อนที่ไปเท่าไรจาก frame ก่อนหน้า
3. Loop Closure — ตรวจจับจุดที่เคยผ่าน
นี่คือหัวใจที่ทำให้ SLAM แม่นในงานยาว — เมื่อคุณเดินวนกลับมาที่จุดเริ่มต้น SLAM จะ ตรวจจับ ได้ว่า "นี่คือที่เดิม" แล้วปรับ pose ทั้งหมดที่ผ่านมาให้สอดคล้องกัน
ถ้าไม่มี loop closure — error จะสะสม (drift) ไปเรื่อยๆ การเดินรอบอาคาร 200 เมตรอาจคลาดเคลื่อนถึง 50 ซม. ที่ปลายทาง แต่เมื่อมี loop closure ระบบจะ redistribute error กลับไปทุก node ด้วย Pose Graph Optimization ทำให้ error เฉลี่ยเหลือไม่กี่ ซม.
4. Bundle Adjustment / Graph Optimization
ขั้นตอนสุดท้ายคือการปรับ pose ทั้งหมดให้ consistent โดยใช้:
- g2o (General Graph Optimization)
- GTSAM (Georgia Tech Smoothing And Mapping)
- Ceres Solver
หลักการคือมองทุก pose เป็น node และทุก measurement เป็น edge แล้วหา configuration ที่ minimize error รวมทั้งระบบ — คล้ายกับการ adjust traverse แบบ least squares ที่วิศวกรสำรวจคุ้นเคย แต่ทำใน 6 มิติ (X, Y, Z, roll, pitch, yaw)
ประเภทของ SLAM ที่ใช้ในงานสำรวจ

LiDAR SLAM
ใช้ LiDAR เป็น sensor หลัก เหมาะกับงานที่ต้องการ point cloud ความแม่นสูง
- ข้อดี: ทำงานได้ในที่มืด, ไม่ขึ้นกับแสง, ระยะไกล (50-200 ม.)
- ข้อเสีย: ราคาแพง, ไม่มีสี (ต้องคู่กับกล้องถ้าต้องการ RGB)
- ตัวอย่างเครื่อง: GeoSLAM ZEB Horizon, Emesent Hovermap, Leica BLK2GO, FARO Orbis
Visual SLAM (vSLAM)
ใช้กล้องเป็น sensor หลัก ติดตาม feature ในภาพ
- ข้อดี: เครื่องเล็ก ราคาถูก, ได้สีและ texture
- ข้อเสีย: แย่ในที่มืดหรือผนังเรียบไร้ feature, ระยะใกล้
- ตัวอย่าง: ORB-SLAM3, AR Kit/AR Core ในมือถือ
Visual-Inertial SLAM (VI-SLAM)
รวม Visual SLAM กับ IMU — ใช้กันแพร่หลายใน AR และ drone
- ข้อดี: เสถียรกว่า Visual SLAM ล้วน, รับมือกับการเคลื่อนไหวเร็วได้ดี
- ตัวอย่าง: VINS-Fusion, OpenVINS
LiDAR-Inertial SLAM (LIO)
รวม LiDAR กับ IMU — เป็น standard ของ Mobile Mapping ระดับ professional ปัจจุบัน
- ตัวอย่างอัลกอริทึม: LIO-SAM, FAST-LIO2, LOAM, Cartographer
SLAM ในงานสำรวจ — เครื่องมือและการใช้งานจริง
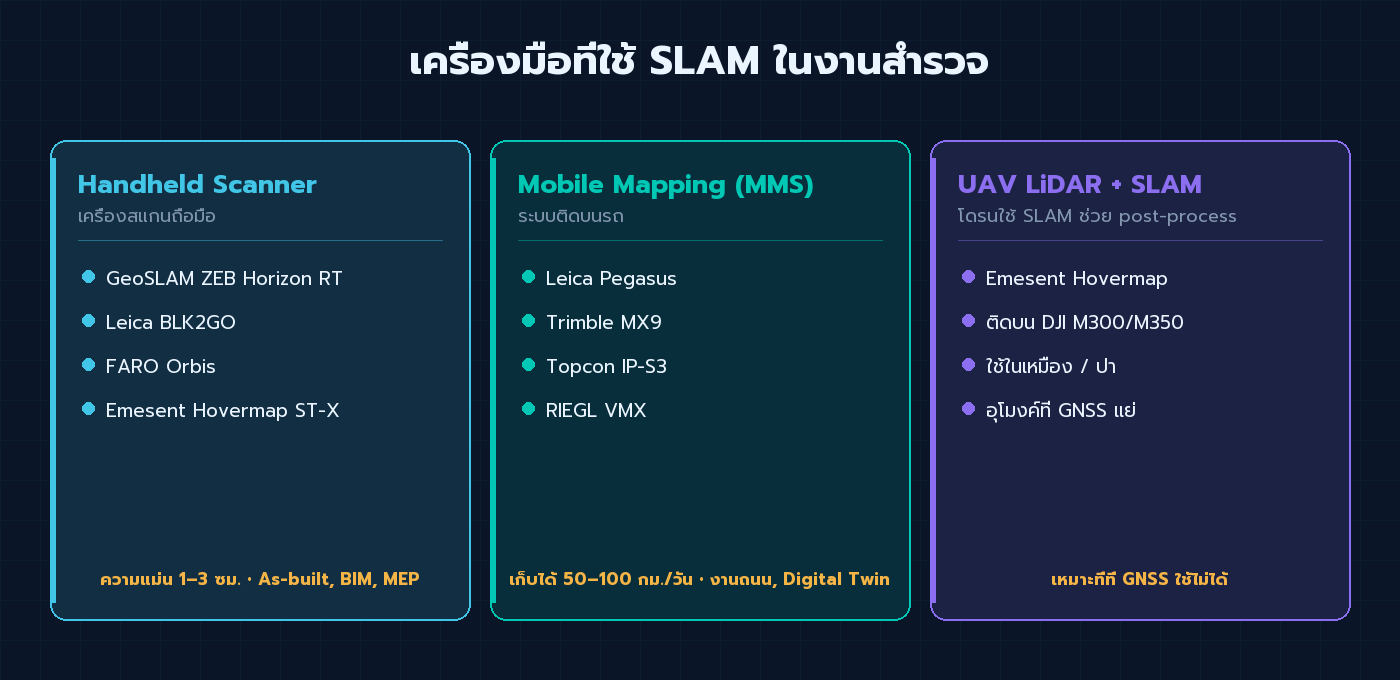
Handheld Scanner (เครื่องสแกนถือมือ)
เครื่องสแกนแบบถือมือเดิน-สแกนไป เหมาะกับงานในอาคาร/พื้นที่จำกัด
| รุ่น | ความแม่นทั่วไป | จุดต่อวินาที | ระยะสแกน |
|---|---|---|---|
| GeoSLAM ZEB Horizon RT | 1-3 ซม. | 300,000 | 100 ม. |
| Leica BLK2GO | 1-2 ซม. | 420,000 | 25 ม. |
| FARO Orbis | 1-2 ซม. | 640,000 | 120 ม. |
| Emesent Hovermap ST-X | 2-3 ซม. | 640,000 | 300 ม. |
ใช้กับงาน:
- As-built อาคาร / โรงงาน
- สแกน BIM ของ MEP
- งานก่อสร้างเพื่อตรวจ progress
- พิพิธภัณฑ์ / โบราณสถาน
Mobile Mapping System (MMS)
ระบบติดบนรถ ใช้เก็บข้อมูลถนน / โครงสร้างพื้นฐานจำนวนมาก
- เครื่อง: Leica Pegasus, Trimble MX9, Topcon IP-S3, RIEGL VMX
- เก็บได้: 50-100 กม./วัน
- ความแม่น: 2-5 ซม. (ในที่ที่มี GNSS ดี)
- ใช้กับ: งานถนน, road asset inventory, digital twin เมือง
UAV LiDAR ที่ใช้ SLAM
โดรน LiDAR บางรุ่นใช้ SLAM ช่วย post-process โดยเฉพาะใต้ canopy ที่ GNSS แย่
- Emesent Hovermap (ติดโดรน DJI M300/M350)
- ใช้ในเหมือง / ป่า / อุโมงค์ที่ GNSS ใช้ไม่ได้
ความแม่นยำ — SLAM vs Static TLS

นี่คือคำถามที่วิศวกรสำรวจถามบ่อยที่สุด — SLAM แม่นพอใช้งานไหม?
| รายการ | Static TLS (Leica RTC360, FARO Focus) | SLAM (Handheld) |
|---|---|---|
| ความแม่นจุดต่อจุด | 2-4 มม. | 10-30 มม. |
| ความแม่น registration | 3-6 มม. | 20-50 มม. (ขึ้นกับ loop closure) |
| ความเร็วเก็บข้อมูล | ช้า (ตั้ง 10-50 จุด/วัน) | เร็วมาก (1 อาคารใน 1 ชม.) |
| ต้องการ target / control | มี | มี/ไม่มี ก็ได้ |
| Drift ในงานยาว | ไม่มี (registration ทีละสถานี) | มี (แก้ด้วย loop closure / GCP) |
สรุปง่ายๆ: SLAM เร็วกว่า 10-20 เท่า แต่ ความแม่นต่ำกว่า 5-10 เท่า — เลือกตามงาน
วิธีเพิ่มความแม่นยำของ SLAM
- วาง Control Point (GCP) ในรูปทรงสะท้อนหรือตำแหน่งรู้พิกัด — แล้ว constrain SLAM ให้ผ่านจุดเหล่านี้
- เดินให้เกิด Loop Closure — อย่าเดินเป็นเส้นตรงยาวๆ ให้วนกลับเสมอ
- เดินช้าและสม่ำเสมอ — การหมุนเร็วทำให้ scan matching เพี้ยน
- หลีกเลี่ยงพื้นที่ feature-poor — ทางเดินยาวที่มีแต่ผนังขาวเรียบ SLAM จะ drift หนัก
- Post-process ด้วย software ของผู้ผลิต — เช่น GeoSLAM Connect, Emesent Aura — ปรับ optimization ได้ดีกว่า real-time
Workflow งานจริงด้วย Handheld SLAM Scanner
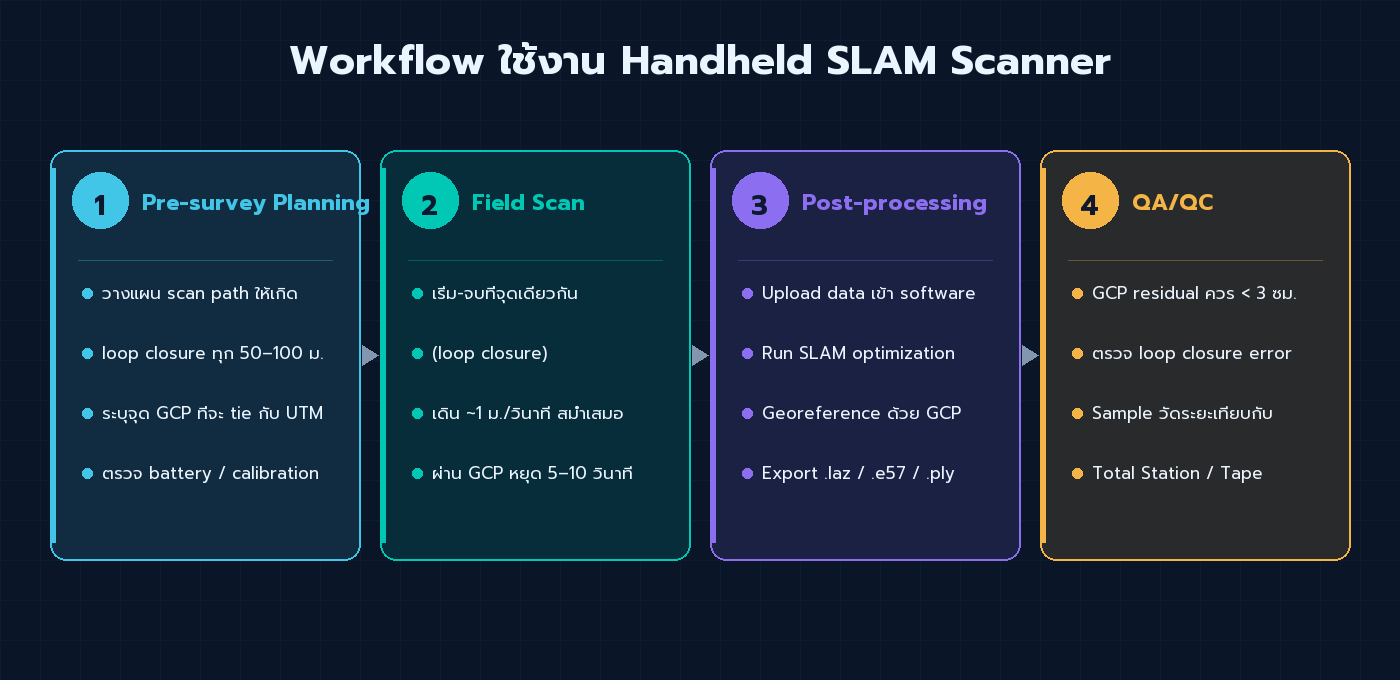
ขั้นตอนที่ 1 — Pre-survey Planning
- เดินสำรวจพื้นที่ก่อน วางแผน scan path ให้เกิด loop closure ทุก 50-100 ม.
- ระบุจุด GCP ที่จะ tie กับระบบพิกัดภายนอก (UTM, MGA, Indian 1975)
- ตรวจ battery, storage, calibration ของเครื่อง
ขั้นตอนที่ 2 — Field Scan
- เริ่มและจบ scan ที่จุด เดียวกัน เพื่อให้ loop closure ทำงาน
- เดินด้วยความเร็วคงที่ (~1 ม./วินาที สำหรับเครื่องส่วนใหญ่)
- ผ่าน GCP ทุกจุด หยุดสแกน 5-10 วินาที
ขั้นตอนที่ 3 — Post-processing
- Upload data เข้า software (GeoSLAM Connect, Cyclone REGISTER 360, Emesent Aura)
- Run SLAM optimization → ได้ point cloud ที่ aligned
- Georeference ด้วย GCP → แปลงเข้า UTM Zone 47/48 ถ้าต้องการ
- Export เป็น .laz, .e57, .ply ตามต้องการ
ขั้นตอนที่ 4 — QA/QC
- เปรียบเทียบ GCP residual — ควร < 3 ซม.
- ตรวจสอบ loop closure error ใน report
- Sample วัดระยะใน point cloud เทียบกับการวัดจริง (Total Station / Tape)
เปรียบเทียบ SLAM กับเทคโนโลยีอื่น
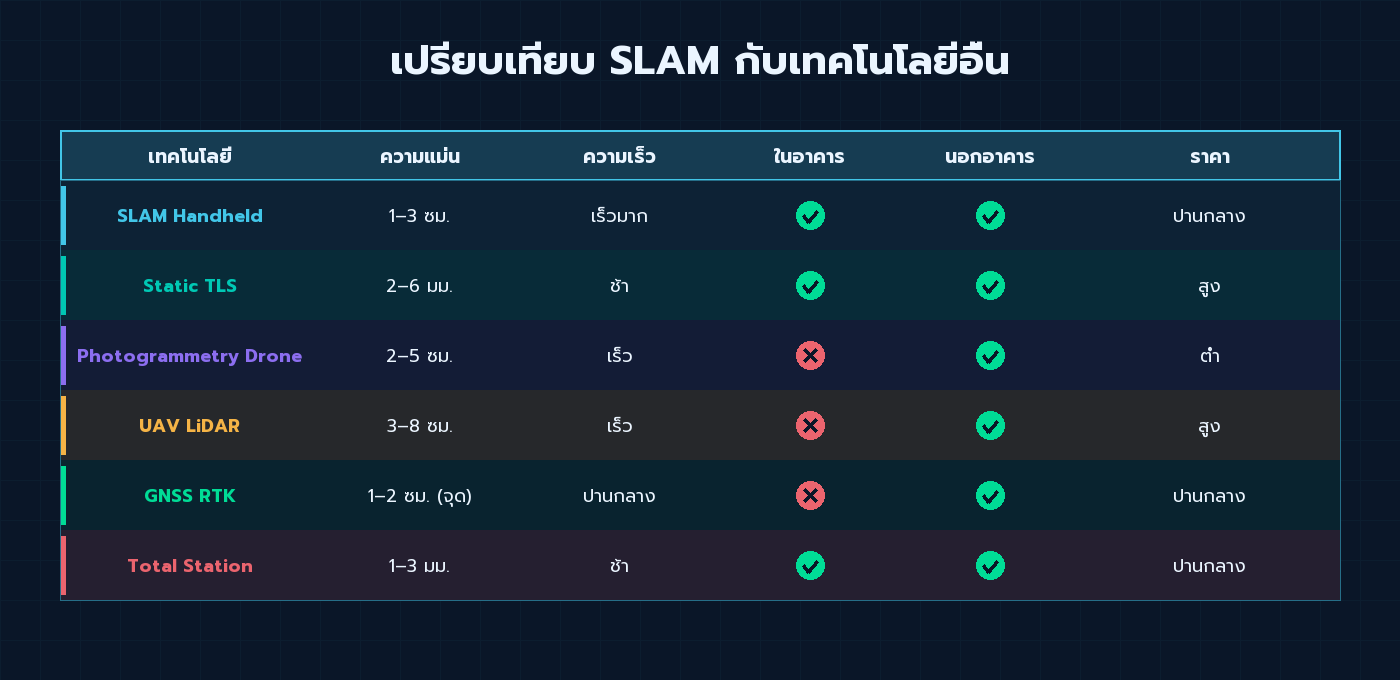
| เทคโนโลยี | ความแม่น | ความเร็ว | ใช้ในอาคาร | ใช้นอกอาคาร | ราคา |
|---|---|---|---|---|---|
| **SLAM Handheld** | 1-3 ซม. | เร็วมาก | ✅ ดีมาก | ✅ ได้ | ปานกลาง-สูง |
| **Static TLS** | 2-6 มม. | ช้า | ✅ ดีมาก | ✅ ดีมาก | สูง |
| **Photogrammetry (Drone)** | 2-5 ซม. | เร็ว | ❌ | ✅ ดีมาก | ต่ำ-ปานกลาง |
| **UAV LiDAR** | 3-8 ซม. | เร็ว | ❌ | ✅ ดีมาก | สูง |
| **GNSS RTK** | 1-2 ซม. (จุดเดียว) | ปานกลาง | ❌ | ✅ ดีมาก | ปานกลาง |
| **Total Station** | 1-3 มม. | ช้า | ✅ ได้ | ✅ ดีมาก | ปานกลาง |
อ่านเพิ่มเติม:
- LiDAR Scanning Guide ฉบับวิศวกรสำรวจ
- UAV LiDAR vs Photogrammetry — เลือกใช้อย่างไร
- 3D Model จาก Point Cloud สู่งานสำรวจจริง
- Gaussian Splatting คืออะไร — เทคโนโลยี 3D Reconstruction รุ่นใหม่
เมื่อไหร่ควรเลือกใช้ SLAM?
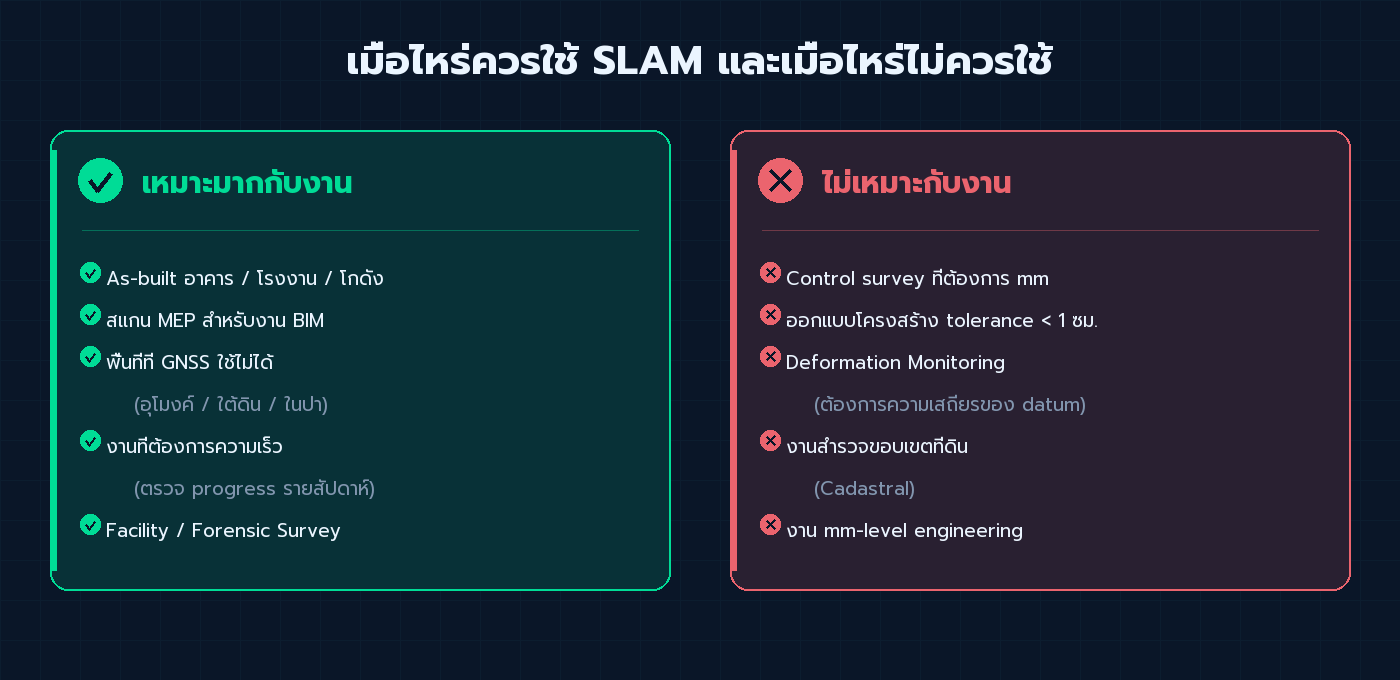
✅ เหมาะมาก กับงานเหล่านี้:
- As-built อาคาร / โรงงาน / โกดัง
- สแกน MEP สำหรับ BIM
- งานในที่ที่ GNSS ใช้ไม่ได้ (อุโมงค์, ใต้ดิน, ในป่า)
- งานที่ต้องการความเร็ว (ตรวจ progress รายสัปดาห์)
- งาน facility management / forensic survey
❌ ไม่เหมาะ กับงานเหล่านี้:
- งาน control survey ที่ต้องการ mm accuracy
- งานออกแบบโครงสร้างที่ tolerance < 1 ซม.
- งาน deformation monitoring (ต้องการความเสถียรของ datum)
- งานสำรวจขอบเขตที่ดิน / cadastral
สรุป

SLAM เปลี่ยนวิธีการเก็บข้อมูล 3D อย่างสิ้นเชิง — จากเดิมที่ต้องตั้งกล้องทีละจุด มาเป็น "เดินแล้วเก็บได้เลย" โดยไม่ต้องพึ่ง GPS แม้จะแม่นน้อยกว่า Static TLS แต่ความเร็วและความสะดวกทำให้เหมาะกับงานหลายประเภทที่วิธีเดิมทำไม่ได้
สำหรับวิศวกรสำรวจมืออาชีพ — SLAM ไม่ได้มาแทน Total Station หรือ GNSS RTK แต่เป็น เครื่องมือเสริม ที่ช่วยขยายขอบเขตงานสำรวจไปยังพื้นที่และโจทย์ที่เคยทำไม่ได้ ทักษะใหม่ที่ต้องเรียนรู้คือ — เข้าใจหลักการ loop closure, การวาง GCP ให้เหมาะกับ SLAM, และการอ่าน QA report ให้เป็น
ติดต่อ WAIPIA — ผู้เชี่ยวชาญงาน 3D Scanning และ Mobile Mapping
หากคุณมีโครงการที่ต้องการสำรวจด้วย Handheld LiDAR Scanner, Mobile Mapping หรือต้องการคำปรึกษาเรื่องการเลือกเทคโนโลยีให้เหมาะกับงาน — ทีม WAIPIA Development ยินดีให้คำแนะนำครับ
- 🏢 บริษัท ไวเปีย ดีเวลลอปเม้นท์ จำกัด (Waipia Development)
- 📞 โทรศัพท์: 095-7243421
- 💬 Line OA: @info_wd
- 🌐 เว็บไซต์: waipia.com